Chapitre 17

MPSI Chapitre 17
OSCILLATIONS MÉCANIQUES FORCÉES
17-1 Oscillateur harmonique soumis à des frottements fluides et à une force excitatrice sinusoïdale
On considérera dans ce chapitre un point matériel M, de masse m, mobile sur un axe Ox., soumis à :
- une force de rappel (due à un ressort parfait) – k x
x
u
,
- une force de frottement fluide (ou "frottement visqueux") du type –
x
x
u
, c'est à dire proportionnelle à
la vitesse de M,
- une "force excitatrice" : f
x
u
. On n'étudiera que le cas où la force excitatrice est une fonction sinusoïdale
de la date soit : f = F cos(t + ) .
L'élongation, ou abscisse de M est donc solution de l'équation différentielle :
fxxkxm
soit :
fxxkxm
.
La solution de l'équation différentielle est la somme de la solution générale de l'équation sans second
membre, soit xT, et d'une solution particulière de l'équation complète, soit xP. Les constantes d'intégration
intervenant dans xT étant déterminées par les conditions initiales (mais, bien sûr en utilisant l'expression
complète x = xT + xP).
La solution de l'équation sans second membre xT peut prendre différentes formes, comme on l'a vu au
12-3 : régime apériodique, critique ou pseudopériodique, suivant l'importance de l'amortissement. Dans tous
les cas,
0)x(lim T
t
, du fait de la présence d'exponentielles décroissantes...
On a vu, en électrocinétique, qu'une solution particulière de ce type d'équation est sinusoïdale, de
même pulsation que le second membre de l'équation différentielle, soit xP = X cos(t + ).
Au bout d'un temps plus ou moins long, on peut faire l'approximation x = xP. L'oscillateur est alors en
régime sinusoïdal permanent.
On ne cherchera ici que la solution particulière sinusoïdale, c'est-à-dire l'amplitude et le déphasage de
x par rapport à f, en régime sinusoïdal permanent.
17-2 Recherche de l'amplitude et du déphasage en régime sinusoïdal permanent
On peut mettre l'équation différentielle sous l'une de ses formes canoniques en posant :
m2
(coefficient d'amortissement) et
m
k
0
(pulsation propre).
m
f
xx2x 2
0
ou
0
0kkm
m
Q
(facteur de qualité).
m
f
xx
Q
x2
0
0
La résolution utilise la même méthode qu'en électrocinétique : on associe à chaque grandeur fonction
sinusoïdale du temps une "grandeur complexe associée" :
)tiexp(X)t(iexpXx
avec
)iexp(XX
(amplitude complexe de l'élongation).
)tiexp(F)t(iexpFf
avec
)iexp(FF
(amplitude complexe de l'abscisse de la force
excitatrice).
x est donc solution de l'équation différentielle complexe associée :
m
f
xx
Q
x2
0
0
donc x est
solution de l'équation algébrique complexe :
m
f
xx
Q
)i(x)i( 2
0
0
2
soit, en divisant par exp(i t)
les deux membres :
m
F
XX
Q
iX 2
0
0
2
donc
Q
i
m
F
X0
2
2
0
.

On en déduit l'amplitude de l'élongation :
2
0
2
2
2
0Q
m
F
X
et le déphasage de
l'élongation par rapport à l'abscisse de la force excitatrice : – = :
Si < 0 :
)(Q
tanArc 2
0
20
. Si > 0 :
)(Q
tanArc 2
0
20
On constate que si = 0, X prend la valeur
2
0
0m
F
X
et = 0.
Si = 0, =
2
. Si
, X
0 et
–
17-3 Résonance d'élongation
17-3-1 Pulsation à la résonance, amplitude de l'élongation à la résonance
L'amplitude de l'élongation est maximale si
2
0
2
2
2
0Q
est minimal donc si sa dérivée par
rapport à est nulle :
0
Q
2))(2(2 2
2
0
2
2
0
donc pour = 0, et éventuellement pour :
– 2 02 + 2 2 +
0
Q2
2
0
soit
2
0Q21
1
.
Il n'y a donc résonance d'élongation que si
2
1
Q
et la pulsation à la résonance est
inférieure à la pulsation propre
2
0R Q21
1
. L'amplitude à la résonance d'élongation est donc :
2
2
2
2
2
0
R
QQ21
1
Q21
11
m
F
X
soit
2
0
RM
Q41
1
QX
XX
si
2
1
Q
, sinon XM =X0.
On remarque que XR est une fonction croissante de Q et que si Q
, R
0 et XM
.
D'autre part, de l'expression de R, on tire
2
0
R
2
12
1
Q
et en reportant dans l'expression de
XM, après simplification, on obtient
4
0
R
0
M
1
X
X
. L'équation de la courbe sur laquelle se trouvent les
maxima de X est donc
4
0
0
1
X
X
.

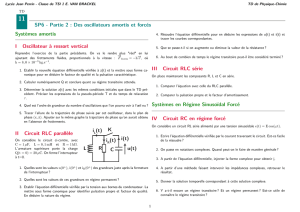
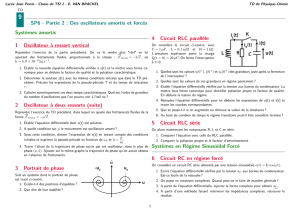
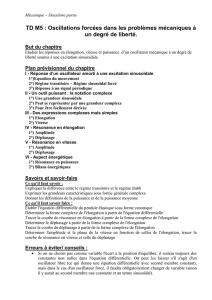
17-3-2 Variables réduites, tracés
Pour les tracés, on utilise les variables réduites :
0
X
X
et
0
.
On a alors :
2
1
2
2
22 Q
)1(
et
2
M
Q41
1
Q
=
2
1
42 Q41
Q
1
Les maxima de sont sur la courbe d'équation
2
1
4
1
.
Si < 1 :
1
Q
1
tanArc
. Si > 1 :
1
Q
1
tanArc
– . On pourrait encore
démontrer que dans tous les cas
2
1
QtanArc
(voir 17-4).
Les tracés pour correspondent aux mêmes valeurs de Q que ceux de .
0
0
X
X
Q=4
Q=1/4
Q=2
Q=1 2/1Q
M
C
1
2
2/1
0
0
X
X
Q=4
Q=1/4
Q=2
Q=1 2/1Q
M
C
1
2
2/1
0
-90
-180
0
-90
-180

17-3-3 Bande passante (à – 3 dB)
Pour Q
2
1
, M = 1 donc à la coupure (unique)
2
1
2
1
2
2
22 2
2
1
Q
)1(
. On obtient :
422
CQ41
Q
1
2
Q21
1
Pour Q
2
1
, les coupures correspondent à
2
1
42
M
CQ21
Q
2
2
, les pulsations réduites aux
coupures sont donc solutions de l'équation
422
2
22 Q21
Q
2
Q
)1(
dont la résolution donne les
résultats suivants :
Si Q
2
1
1
il y a deux coupures, pour
422
CQ41
Q
1
Q21
1
.
Si
2
1
Q
2
1
1
, il n'y en a qu'une, pour
422
CQ41
Q
1
Q21
1
.
On remarque que pour Q =
2
1
, C = 1 (donc C = 0).
On remarque aussi que si Q est très grand, les pulsations réduites aux coupures sont obtenues avec
des développements limités :
Q21
1~
Q
1
1~
1
et
Q21
1~
Q
1
1~
1
. La bande passante est donc,
en pulsation réduite :
Q
1
ou, en pulsation :
mQ
0
et
N
N
Q00
17-4 Résonance de vitesse
On a vu que
Q
i
m
f
x0
2
2
0
. En posant v =
x
: abscisse de la vitesse, on a : v = i x et on en
déduit que V = i X soit
1
iQ1
mFQ
Q
i
m
F
i
V0
0
2
2
0
(en multipliant haut et bas par
0
iQ
).
L'amplitude de la vitesse est
2
2
0
1
Q1
m
QF
V
. Elle est maximale pour = 1 soit
0
, il
y a alors résonance de vitesse.
À la résonance de vitesse, l'amplitude de la vitesse est
0
Mm
QF
V
.

Aux coupures, elle est
2
V
VM
C
donc les pulsations de coupure sont données par l'équation
Q
11
, soit 2
01
Q
dont les solutions positives sont
1
Q41
Q212
1
et
1
Q41
Q212
2
. La bande passante, pour l'amplitude de la vitesse, en pulsation réduite est donc
Q
1
, ou en pulsation :
Q
0
, ou en fréquence :
Q
N
N0
. Le facteur de qualité exprime donc
l'acuité de la résonance de vitesse :
N
N
Q00
.
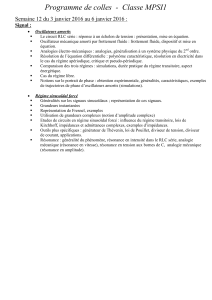
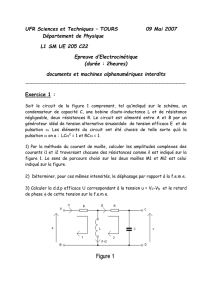
La courbe de résonance de vitesse peut être tracée avec les variables réduites et
M
V
V
, son équation est
1
1
Q
1
2
2
et le déphasage de l'abscisse v de la vitesse par rapport à celle de la force excitatrice
f est
1
QtanArc
. (On remarque que v = i x donc que v est déphasé de
2
par rapport à x,
ce qui justifie l'expression de au 17-3-2). Aux coupures on a 1 =
4
et 2 = –
4
.
Les tracés pour et correspondent aux mêmes valeurs de Q que ceux de au 17-3-2.
Le tracé effectué pour est trompeur car VM est proportionnel à Q donc
M
V
V
ne donne pas une idée
claire des maxima de V : si l'on traçait V en fonction de (ou de ou de N), on aurait des maxima d'autant
plus grands que Q est plus grand. L'avantage des tracés effectués est que tous les maxima sont ramenés à la
valeur 1 et qu'on peut donc repérer les coupures et les bandes passantes, quel que soit Q, sur la même
horizontale d'ordonnée
2
1
.
M
V
V
0
2/1
1
2
M
V
V
0
2/1
M
V
V
0
2/1
1
2
 6
7
8
6
7
8
1
/
8
100%