PCSI 3 Colle d`Info Physique N°4 : trajectoires dans l`espace des

Lycée Kléber – PCSI 3 –02/03 - colle d’Info Physique N°4 page 1/2
PCSI 3 Colle d’Info Physique N°4 : trajectoires dans l’espace des phases
Dans cette colle, nous étudierons les trajectoires de phases en mécanique sur des exemples concrets :
l’espace ou le plan de phase est l’espace de coordonnées (x,
dt
dx
), c’est-à-dire qu’on représente la
vitesse en fonction du déplacement. Nous verrons différentes commandes MAPLE permettant de
visualiser ces trajectoires et surtout les exemples choisis permettront de dégager les informations qu’on
peut tirer d’un diagramme de phase qui est un ensemble de quelques trajectoires de phase d’un
systèmes donné. Comme pour les équations différentielles, MAPLE permet de tracer toute trajectoire
de phase, même si l’équation différentielle de départ est non-linéaire.
Répondre aux questions posées
1. L’oscillateur harmonique unidimensionnel sans frottement
C’est un système mécanique dont le mouvement est déterminé par une variable seulement et régi par
l’équation différentielle
x
dtxd ².
²
²
(1)
exemples : pendule simple aux petits angles : x= et ²=g/l ; masse au bout d’un ressort accroché au
plafond : x=z= l-léqu (où l est la longueur du ressort et léq la longueur du ressort à l’équilibre ) et
²=k/m
Pour accéder à la relation donnant
dt
dx
en fonction de x, on peut soit multiplier l’équation (1) par
dt
dx
et
intégrer (cas du pendule) , soit écrire la conservation de l’énergie mécanique pour ce cas (cas du
ressort :
mécaExk
dt
dx
m ²..
2
1
..
2
12
) . La constante d’intégration (cas 1 ) ou l’énergie mécanique (cas2)
étant déterminés par les conditions initiales sur le système (position et vitesse initiale)
Pour le cas du ressort avec m=0,2kg et k=1N.m-1 , superposer dans le plan de phase les trajectoires
de phase correspondant aux conditions initiales suivantes : xo=0,1m , vo=0 puis
xo=0,1m , vo=0,1m.s-1 ; prendre des couleurs différentes.
Pour résoudre l’équation différentielle, penser à > X :=dsolve(
> assign(X) ;
Commenter le graphique obtenu :
- Sens de la trajectoire ?
- Quel renseignement tirer du fait que les trajectoires sont fermées ?
2. L’oscillateur harmonique unidimensionnel avec frottement fluide
C’est un système mécanique dont le mouvement est déterminé par une variable seulement et régi par
l’équation différentielle
0².
2
²
² x
dt
dx
dtxd
(2)
exemples : Les mêmes qu’avant en tenant compte de la force de frottement fluide exercée par l’air. Si
on veut une force de frottement plus importante, on étudie ces mouvements dans un fluide plus
visqueux que l’air (par exemple l’eau).
Pour cette équation , il est impossible de trouver une équation seule liant x et
dt
dx
, on aura un système
comprenant toujours une équation différentielle. Le problème sera ramené à la résolution d’un système
d’équations différentielles du premier ordre (comme par exemple lors de l’étude d’une particule chargée
dans les champs E et B ).
On pose y=
dt
dx
et on obtient alors le système :
y
dt
dx
x
y
dt
dy ².
.2
Pour la résolution de ce type de système, charger le fichier colle4.mws – ajouter d’autres trajectoires en
modifiant les conditions initiales.
Commenter les graphiques obtenus :
- A quelle situation correspondent-ils (quelle est la différence entre les deux graphiques) ?
- Justifier le nom de « foyer attracteur » donné à l’origine.

Lycée Kléber – PCSI 3 –02/03 - colle d’Info Physique N°4 page 2/2
- On affirme que (si Q>10 environ) le facteur de qualité Q donne l’ordre de grandeur des
oscillations pratiquement observables avant la relaxation vers l’état d’équilibre.
Vérifier ceci en changeant justement la valeur de Q.
- Imaginer un circuit électrique simple permettant de visualiser le même trajectoire en mode XY à
l’oscilloscope.
3. Les oscillateurs non-linéaires : pendule pesant et notion de bifurcation
a) Pendule pesant
Nous reprenons l’exemple du pendule pesant sans frottement régi par l’équation différentielle :
sin.
²
²l
g
dt
d
Cette équation est non-linéaire, on ne peut procéder comme dans le cas précédent ;
nous allons alors utiliser la commande phaseportrait du package DEtools : cette commande permet
de tracer directement la solution d’une équation différentielle quelconque ou d’un système d’équations
différentielles du premier ordre. Former un système comme dans le 2. puis voir avec l’aide en ligne
pour la syntaxe à utiliser. Pour l=0,5m , tracer les portraits de phase obtenus avec les conditions
initiales suivantes : (0)=1 ’(0)=0 puis (0)=1,5 ’(0)=0 puis (0)=2 ’(0)=0 puis (0)=2,5 ’(0)=0 puis
(0)=2,5 ’(0)=2 puis (0)=2,5 ’(0)=-3. Superposer les trajectoires et prendre des couleurs différentes,
faire varier t de 0 à 2s.
Commenter les graphiques obtenus :
- Comment interpréter le déformation de l’ellipse pour les grandes valeurs de (0) ?
- A quoi correspond la situation (0)=2,5 ’(0)=-3 ?
b) oscillateur non-linéaire avec frottement
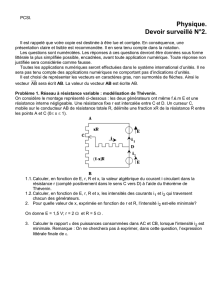
Soit la situation suivante : un cercle de centre O et de rayon R=0,5m tourne autour de l’axe vertical Oz
à la vitesse angulaire constante (cf. figure). On a
dt
d
. Un anneau A de masse m glisse sans
frottement solide (mais avec frottement fluide – pour des simplicités de calcul..) sur ce cercle. Sa
position sur le cercle est repérée par l’angle :
O
A
R
ur
u
z
u
- En écrivant le PFD dans le référentiel
tournant puis en le projetant dans la base
« cylindrique » (ur , u , u ) – attention, elle
n’est pas directe – on obtient l’équation
différentielle régissant le mouvement de A :
dt
d
RRg
dt
d
R
..cos.sin²..sin.
²
²
.
est le coefficient de frottement fluide, =1 SI
- Tracer alors les portraits de phase pour
=3rad/s puis =6rad/s et les conditions
initiales suivantes : (0)= 2 et
)0(
dt
d
=0
puis (0)=2, ’(0)=-4. Superposer les trois
courbes, prendre des couleurs différentes.
Faire varier t de 0 à 10s.
Commenter les graphiques obtenus :
- Décrire le mouvement de l’anneau pour =3rad/s puis pour =6rad/s
- Déterminer d’abord la/les position(s) d’équilibre de l’anneau (équilibre dans le référentiel
tournant) en fonction de ; introduire une valeur critique
R
g
c
. Préciser le nombre et la
nature (stable/instable) de la position d’équilibre en fonction de . Faire le lien avec les portraits
de phase obtenus.
- Tracer avec MAPLE le diagramme de bifurcation donnant équilibre en fonction de . Un point de
bifurcation (ou une bifurcation tout court) se trouve à l’endroit où le régime des solutions
change : passage d’une position d’équilibre stable à instable par exemple.
S’il reste du temps, terminer sur l’oscillateur de Van der Pol :
0².²)(
²
² x
dt
dx
xh
dtxd
qui présente
un cycle limite dans l’espace des phases.

Lycée Kléber – PCSI 3 –02/03 - colle d’Info Physique N°4 page 3/2
Bibliographie :
BUP N°804 mai 1998 p.849
D. BERNARD Mécanique 2 exercices et problèmes corrigés (MASSON)
V. BOURGES La Physique avec MAPLE
1
/
3
100%