chap-2-cinematique-changements-de

1
Chap. 2
Changements de Référentiels
I. Introduction : ........................................................................................................................... 2
I.1. Intérêt du changement de référentiel : ............................................................................. 2
I.2. Exemple qualitatif de changement de référentiel :........................................................... 2
II. Vitesses dans deux référentiels distincts – Loi de composition : .......................................... 3
II.1. Lois de composition des vitesses : .................................................................................. 3
II.2. Cas particuliers : ............................................................................................................. 4
II.2.1. Mouvement de translation pure : ............................................................................. 4
II.2.2. Mouvement de rotation pure :.................................................................................. 4
II.3. Cas général : ................................................................................................................... 5
II.4. Application au mouvement d'une roue : ......................................................................... 5
II.4.1. Référentiel non tournant : ........................................................................................ 5
III. Accélération dans deux référentiels distincts – Loi de composition : .................................. 7
III.1. Loi de composition des accélérations : ......................................................................... 7
III.2. Cas particuliers : ............................................................................................................ 8
III.2.1. Translation pure : ................................................................................................... 8
III.2.2. Rotation pure : ........................................................................................................ 8

2
Chap. 2
Changements de Référentiels
I. Introduction :
I.1. Intérêt du changement de référentiel :
Nous avons introduit la vitesse et l'accélération dans un référentiel fixe, donc galiléen, ou
absolu. Comme nous l'avons mentionné, ce référentiel est pratique, mais n'est pas conforme à
la réalité. La Terre ayant un mouvement de rotation autour du Soleil et sur elle-même, un
référentiel lié à la Terre n'est pas en toute rigueur galiléen. Pour expliquer la déviation d'un
obus, pour comprendre ce qui se passe lorsqu'un observateur est dans une voiture qui tourne,
il est nécessaire d'introduire des référentiels non galiléens. Le but de ce chapitre est donc de
déterminer le passage de référentiels galiléen à des référentiels non galiléens, et de déterminer
les nouvelles expressions des vecteurs position, vitesse, et accélération.
I.2. Exemple qualitatif de changement de référentiel :
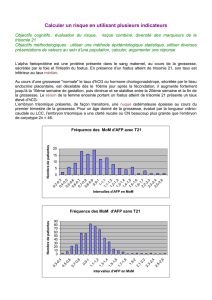
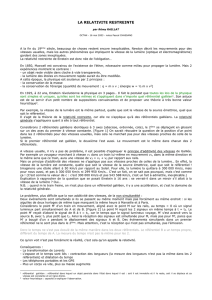
Etudions qualitativement le
mouvement d'un point M sur une roue qui
tourne ssans glisser (Figure 1). Prenons
deux référentiels R et R' , le 1er étant fixe,
le 2ème étant mobile et lié au centre de la
roue.
Dans le référentiel R , c'est à dire pour
un observateur lié à O, le point M décrit
une cycloïde, alors que, pour un
observateur lié à R' , il décrit un cercle.
Figure 1

3
II. Vitesses dans deux référentiels distincts – Loi de
composition :
II.1. Lois de composition des vitesses :
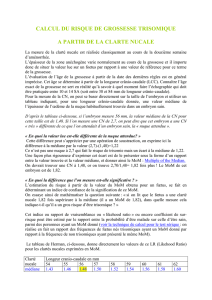
Supposons un référentiel fixe R , et un
référentiel R1 animé d'un mouvement
quelconque par rapport à R . Un repère
zyx eeeO ,,,
est lié à R , tandis qu'un
repère
1111 ,,, kjiO
est lié à R 1 (Figure 2).
Nous allons calculer la vitesse et
l'accélération dans le référentiel fixe. Nous
les appellerons par la suite vitesse absolue
et accélération absolue.
Figure 2
MOOOOM 11
dtMOd
dt
OOd
dt
OMd
a11 v
Le vecteur
MO1
a pour coordonnées dans le repère
1111 ,,, kjiO
, x1, y1 et z1.
dtkzd
dt jyd
dtixd
dt kzjyixd
dtMOd 1111111111111
dt
kd
zk
dt
dz
dt
jd
yj
dt
dy
dt
id
xi
dt
dx 1
11
11
11
11
11
1
dt
kd
z
dt
jd
y
dt
id
xk
dt
dz
j
dt
dy
i
dt
dx 1
1
1
1
1
11
1
1
1
1
1
La vitesse absolue devient :
dt
kd
z
dt
jd
y
dt
id
xk
dt
dz
j
dt
dy
i
dt
dx
dt
OOd
a1
1
1
1
1
11
1
1
1
1
11
v

4
que l'on écrit encore :
era vvv
avec
1
1
1
1
1
1k
dt
dz
j
dt
dy
i
dt
dx
r
v
dt
kd
z
dt
jd
y
dt
id
x
dt
OOd
e1
1
1
1
1
1
1
v
Le vecteur
r
v
a une signification physique simple. C'est la vitesse de M dans le
référentiel mobile considéré comme fixe. Il est appelé vitesse relative de M. Le vecteur
e
v
est appelé vitesse d'entraînement et comporte deux composantes, le 1er décrivant la vitesse
d'un référentiel par rapport à l'autre, le 2ème faisant intervenir les dérivées par rapport au temps
des vecteurs de base du référentiel mobile.
II.2. Cas particuliers :
II.2.1. Mouvement de translation pure :
Supposons que R1 soit animé d'un mouvement de translation par rapport à R . Dans ce
cas, les vecteurs de base ne varient pas dans le temps. La vitesse d'entraînement se réduit à :
dt
OOd
e1
v
II.2.2. Mouvement de rotation pure :
Supposons maintenant que R1 tourne autour de R avec une vitesse angulaire
, pas
nécessairement constante, et supposons pour simplifier que la rotation s'effectue autour de
l'axe (Oz). Les vecteurs
1
i
et
1
j
tournent autour de (Oz), alors que le vecteur
1
k
est constant.
1
11 j
dt
d
did
dt
id

5
1
11 i
dt
d
djd
dt
jd
11111111 iyjxiyjx
e
v
Posons
1
k
et calculons
MO1
e
kzjyixkMO v 11111111
MO
e1
v
Le vecteur
est appelé vecteur rotation et est orthogonal au plan de rotation.
II.3. Cas général :
Supposons que R1 ait un mouvement quelconque par rapport à R . On peut montrer qu'à
chaque instant ce mouvement est décomposable en un mouvement de translation et de
rotation. Alors le vecteur
change à chaque instant. Il est appelé vecteur rotation
instantané. La vitesse absolue est :
MO
dt
OOd
rera 1
1 vvvv
II.4. Application au mouvement d'une roue :
Prenons comme exemple une roue qui tourne sans glisser avec une vitesse angulaire
,
dont le centre O1 se déplace avec une vitesse uniforme vo, et appliquons la loi de composition
des vitesses. Nous prendrons deux exemples de référentiels mobiles. L'un est en translation
par rapport à R, l'autre tourne à la même vitesse angulaire que la roue.
II.4.1. Référentiel non tournant :
Le référentiel R ' est en translation par rapport à R (Figure 3). Les vecteurs de base
associés sont donc constants au cour du temps.
tR
tRMO
sin
cos
0
'
dans le repère
''' ,,,' zyx eeeO
et
R
tOO o
v
0
'
 6
7
8
6
7
8
1
/
8
100%