forces et mouvements.pdf

C. Guibal – Bellevue 1ère S physique- 3. Mécanique : mouvement et forces 1/9
MECANIQUE Partie A : FORCE et MOUVEMENT d’un SOLIDE
Les savoir-faire
Déterminer et représenter le vecteur vitesse d’un point mobile sur un enregistrement
Pour un solide en rotation autour d’un axe fixe, relier la vitesse d’un point à la vitesse angulaire.
Identifier et représenter les forces qui s’exercent sur un solide (poids, réaction du sol, poussée
d’Archimède, tension d’un fil ou d’un ressort). Connaître les effets produits par une force.
Connaître et appliquer les lois de Newton : Dans un référentiel galiléen, si le vecteur VG du centre d’inertie
1ère loi : ne varie pas alors la somme
F
=
f
des forces qui s’exercent sur le solide est nulle
et réciproquement
2ème loi varie alors la somme
F
=
f
des forces qui s’exercent sur le solide n’est pas nulle.
Sa direction est son sens sont ceux de la variation de VG entre deux instants proches
3ème loi A et B étant deux corps, soient
ABF/
la force exercée par B sur A et
BAF/
la force
exercée par A sur B, alors on a toujours l’égalité vectorielle
BAF/
= -
ABF/
1- MOUVEMENT d’un SOLIDE INDEFORMABLE
1- 1 Qu’est-ce qu’un référentiel?
Considérons une mouche, assimilable à un point, qui reste "collée" au plafond d'une voiture qui
avance sur une route rectiligne horizontale à la vitesse constante V = 20 m.s-1.
La trajectoire de la mouche par rapport au solide Terre est une droite. Par rapport à la Terre, le
vecteur vitesse de la mouche est constant, sa norme a pour valeur V = 20 m.s-1.
La trajectoire de la mouche par rapport au solide voiture est un point immobile. Par rapport au
solide voiture la vitesse de la mouche est V' = 0 m.s-1 puisqu'elle reste "collée" au plafond.
Cet exemple montre qu'il faut toujours préciser le référentiel par rapport auquel on étudie
le mouvement d'un mobile.
Remarque : Si la mouche se met à voler dans la voiture son mouvement par rapport au référentiel "Terre"
sera très différent de son mouvement par rapport au référentiel "voiture".
Un référentiel est un solide. Il est déterminé par la donnée de quatre points non
coplanaires. On prend souvent comme référentiel le solide Terre.
On peut également être amené à prendre un "solide" moins concret :
Le référentiel Géocentrique (solide formé par le centre de la Terre et trois étoiles ponctuelles,
les 4 points n'étant pas dans un même plan) est utilisé pour étudier le mouvement des satellites
terrestres.
Le référentiel Héliocentrique (solide formé par les centres du soleil et de trois autres étoiles,
les 4 points n'étant pas coplanaires) est utilisé pour étudier les voyages interplanétaires (Terre
Mars par exemple) ou pour étudier le mouvement des planètes autour du Soleil.
Dans un référentiel il est possible de tracer une infinité de repères orthonormés
différents ( O, i , j , k ). On choisit celui qui est le mieux adapté au problème posé.
L'étude du mouvement d'un mobile nécessite non seulement le choix d'un référentiel
auquel on associe un repère mais encore le choix d'une horloge permettant de mesurer le
temps.

C. Guibal – Bellevue 1ère S physique- 3. Mécanique : mouvement et forces 2/9
1- 2 Vecteur vitesse d’un point du solide
Vitesse moyenne d’un point
Si, dans le référentiel terrestre, un point P parcourt une distance ∆L pendant une durée ∆t , alors la valeur
de la vitesse moyenne est : Vmoyenne = ∆L / ∆t
( v en m.s-1 ; L en mètre ; t en seconde)
Vitesse instantanée d’un point
La vitesse peut souvent varier à chaque instant. On évalue la valeur absolue de la vitesse instantanée d'un
point P à la date t2 en calculant la vitesse moyenne de ce point entre deux dates t1 et t3, aussi proches que
possibles, encadrant la date t2 :
Vi (t2) = V2 = (P 3 – P1) / (t3 – t1)
A la vitesse instantanée d'un point définie ci-dessus on associe un vecteur de la façon suivante :
le point d'application de est le point P où se trouve le point étudié à cet instant.
la direction de est celle de la tangente en P à la trajectoire suivie par le point étudié.
le sens de est celui du mouvement.
la longueur de représente, à une échelle donnée, la valeur absolue de la vitesse à cet instant.
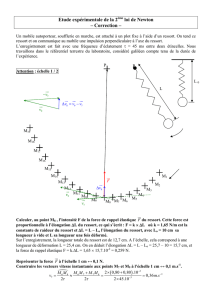
Exemple : Détermination du vecteur vitesse instantanée d'un point.
Un palet plat cylindrique homogène
est mis en mouvement, sans
frottement, sur une table à coussin
d'air inclinée d'un angle sur le plan
horizontal.

C. Guibal – Bellevue 1ère S physique- 3. Mécanique : mouvement et forces 3/9
Le centre G du palet décrit une parabole. A l'aide d'un dispositif approprié on a enregistré les
positions du centre G à des intervalles de temps réguliers de durée = 60 ms ( figure ci-dessus ).
La première position sur le document correspond au point O (t = 0), la dernière au point O´
( t = 18 = 1080 s).
a- Déterminer les mesures V3 et V5 des vecteurs vitesse instantanée du centre d'inertie du
palet aux points G3 et G5.
On assimilera la vitesse instantanée au point G3 à la vitesse moyenne entre les points G2 et G4.
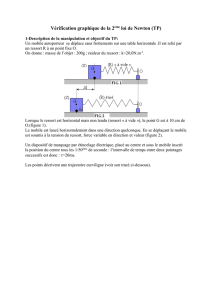
b- Construire les vecteurs et . Indiquer l'échelle sur le schéma.
Solution : Les valeurs instantanées des vitesses sont assimilées aux valeurs
moyennes sur une durée t = 2.
a- Déterminons les normes V3 et V5 des vecteurs vitesse instantanée et du centre d'inertie du palet
aux points G3 et G5 . Les vitesses instantanées en G3 et en G5 sont respectivement assimilées aux vecteurs:
L'énoncé donne = 60 ms et sur le document,
nous mesurons, compte tenu de l'échelle de reproduction : G2 G4 = 4,20 10 - 2 m et G4 G6 = 3,45 10 - 2 m
Ce qui permet de calculer les normes suivantes : V3 = = 0,35 m/s et V5 = = 0,29 m/s
b- La construction demandée est faite sur la figure ci-dessous ( Les échelles sont indiquées sur la figure.
L'échelle des distances est agrandie par rapport à celle de la figure précédente).
Les vecteurs vitesses sont tangents à la trajectoire décrite par le point G.

C. Guibal – Bellevue 1ère S physique- 3. Mécanique : mouvement et forces 4/9
1- 3 Centre d’inertie d’un solide
Connaître le mouvement d'un solide, c'est connaître le mouvement de chacun de ses points.
L'étude, dans le référentiel terrestre, du mouvement d'un solide lancé puis soumis à la seule action de son
poids montre que les mouvements des points constituants le solide sont complexes.
Un seul point a un mouvement plus simple que les autres : le centre d'inertie G (en l'absence de
frottement, ce point décrit une verticale ou une parabole).
Remarque : Tout système matériel est formé de particules quasi ponctuelles A1, A2, ... de masse m1, m2, ...
Le centre d'inertie de ce système coïncide
avec le barycentre G défini par :
O étant un point quelconque (généralement
origine d’un repère) on peut montrer que :
Cas particuliers :
Pour un disque homogène le centre d'inertie G coïncide avec le centre du disque.
Pour tout solide homogène possédant un centre de symétrie, le centre de symétrie coïncide avec le
centre d'inertie de ce solide.
.
1- 4 Mouvement de translation d’un solide
Définition
Le mouvement d’un solide décrit sa vitesse et sa trajectoire. (donc deux adjectifs)
Un solide est en mouvement de translation lorsqu'un segment quelconque de ce solide reste
parallèle à lui-même au cours du déplacement.
Tous les points du solide ont, à chaque instant, le même vecteur vitesse (t).
C'est le vecteur vitesse du solide en translation.
Cas particulier : mouvement de translation rectiligne
Les divers points du solide en translation rectiligne décrivent des droites (ex : luge descendant une piste rectiligne).
Remarque : Si le vecteur vitesse (t) est constant au cours du temps alors le solide est animé d'un
mouvement de translation rectiligne uniforme.
.
1- 5 Mouvement de rotation d’un solide autour d’un axe fixe
Mouvement d’un point d’un solide en rotation
Chaque point d’un solide en rotation autour d’un axe fixe a une trajectoire circulaire.
Vitesse angulaire de rotation d’un solide autour d’un axe fixe
Considérons une poulie en rotation autour d'un axe () fixe dans le référentiel terrestre.
Si pendant la durée de temps dt la poulie tourne d'un angle d
alors la vitesse angulaire de la poulie est : =
dt
d
Remarque : La vitesse d'un point (en m / s) dépend de sa distance à l'axe. Par contre la vitesse angulaire (en
rad / s) est la même pour tous les points.

C. Guibal – Bellevue 1ère S physique- 3. Mécanique : mouvement et forces 5/9
2- FORCES MACROSCOPIQUES s’exerçant sur un solide
Une force macroscopique est la résultante de forces microscopiques réparties en volume ou sur une surface.
Etudions quelques forces courantes :
2- 1 Le poids d'un corps
Définition
On appelle poids d'un objet ponctuel, situé en un point M donné, la force s'opposant à la force exercée par
un fil qui maintient cet objet ponctuel au repos par rapport au solide Terre, pris comme référentiel.
Dans ce système de référence, le poids de l'objet ponctuel peut se mettre sous la forme :
= m où est le vecteur champ de pesanteur terrestre au point M considéré.
Remarque : Pour un objet de dimensions finies le montage devrait se trouver sous vide afin de s'affranchir de
la poussée d'Archimède. Notons que chaque particule microscopique (atome, molécule, ion, etc.) de
l'objet est soumise à l'attraction gravitationnelle de la Terre, représentée par le vecteur force .
La somme de ces forces réparties dans tout le volume du corps est notée .
Peut-on confondre le poids d'un objet et la force d'attraction gravitationnelle
qu'exerce la Terre sur cet objet ? En toute rigueur, il faudrait écrire : = + +
est le poids de l'objet.
est la force d'attraction gravitationnelle de forte intensité qu'exerce la terre sur cet objet.
est une force de faible intensité due à l'attraction des astres autres que la terre (lune, soleil,
etc.) sur cet objet.
est une force de faible intensité due à la rotation de la terre et s'exerçant sur l'objet.
Dans les problèmes étudiés en 1ère S et terminale S on peut négliger et . On confond alors le
poids de l'objet et la force d'attraction gravitationnellen qu'exerce la terre sur cet objet. On écrit :
=
Remarque : Dans certains problèmes étudiés dans l'enseignement supérieur, on ne peut plus négliger et .
En effet :La force est responsable du phénomène des marées. La force explique que
la direction du fil à plomb ne passe pas exactement par le centre de la Terre.
Caractéristiques du poids
Le vecteur poids d'un objet est caractérisé par :
son point d'application : le centre de gravité de l'objet, confondu avec le centre d'inertie.
sa direction : celle du fil à plomb, pratiquement confondue avec la verticale.
son sens : vers le bas.
son intensité P = m g où m : représente la masse de l'objet (en kg)
et g : l'intensité du vecteur pesanteur (en N/kg).
La valeur de g varie très peu avec la latitude et beaucoup avec l'altitude.
En France, au niveau de la mer, g = 9,81 N/kg.
 6
7
8
9
6
7
8
9
1
/
9
100%