2 Partie Matlab

- 9 -
2 Partie Matlab
1 - sous-programme Matlab : calcul de l’itération de l’algorithme de
minimisation de la distance de structure
function [new_hm] = iteration_minimisation_distance_de_structure(hm,e,eps,lambda)
new_hm= hm-((lambda*eps)/(e'*e))*e;
2 – programme Matlab : calcul de l’itération de l’algorithme de
minimisation de la distance de structure
clear
load E.mat
load Yo.mat
p=3
lambda=1;
L=length(E);
E=[zeros(p-1,1);E];%concaténation de E
hm=zeros(p,1);
EPS = eps;
H = hm';
for k=0:L-1
e=flipud(E(k+1:k+p));
ym=e'*hm;
eps=ym-Yo(k+1);
hm = iteration_minimisation_distance_de_structure(hm,e,eps,lambda);
H = [H ; hm'];
EPS = [EPS;eps];
end
%graphe de l'évolution de hm(k)
figure(1),plot(H),grid ;
xlabel('k');
ylabel('hm(k)') ;
title('Graphe de hm(k), avec p=3);
%graphe p=3 évolution de epsilon de k
figure(2),plot(EPS),grid ;
xlabel('k');
ylabel('epsilon(k)') ;
title('Graphe de epsilon(k), avec p=3);

- 10 -
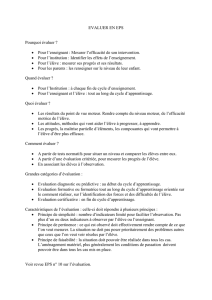
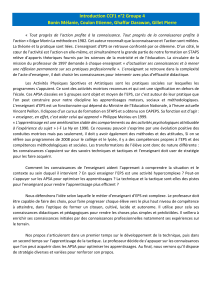
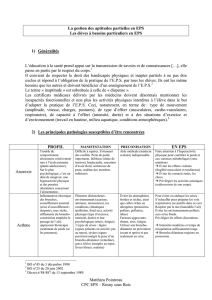
Tracé de l’évolution de hm(k)
Pour k = [0 ; L-1] L = 250 P = {2, 3, 4, 5}

- 11 -
L’ordre de la réponse impulsionnelle ho
On remarque que hm converge à l’ordre 3 et tend vers 0 au dessus de l’ordre 3.

- 12 -
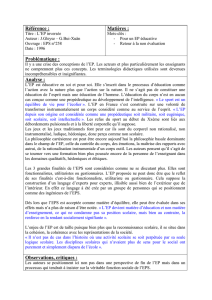
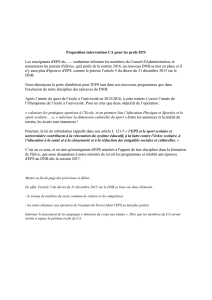
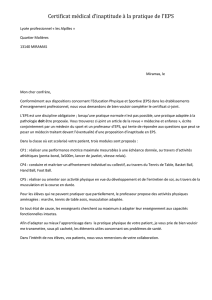
Tracé de l’évolution de ε(k)
Pour k = [0 ;L-1] L = 250 P = 3

- 13 -
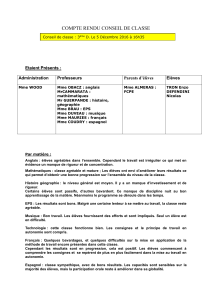
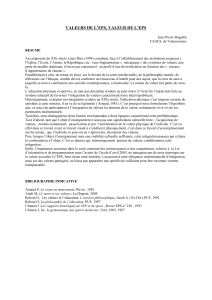
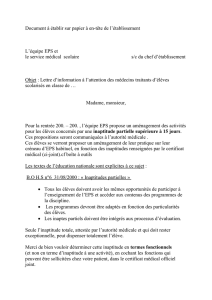
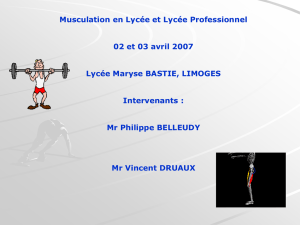
3 – Tracé de hm(k)
Pour λ = {0.5,1.5} P = 3
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%