IV Expérimentation sur DSP TMS320C67

Tsn_3 DUT CNAM GEII 1
ed 2009
TP3 Traitement Numérique du Signal
Sur DSP (processeurs de signaux) :
Filtres IIR (Réponse impulsionnelle Infinie, récursif)
Exemple : Filtre Moyenneur IIR
I Rappels sur filtres IIR
I 1 Description
Décrits par l’équation de récurrence :
k
M
kknk
N
kknn aybxy .. 1
1
1
0
an, bn
xn
yn
Nommés filtre Récursifs
Attention, peuvent être instables (du fait de la rétroaction) !
Fonction de transfert en fonction de la fréquence, en écriture rapide en Z, avec :
ix
ez
2
et
fech
f
x
k
k
M
k
k
k
N
k
az
bz
Xn
Yn
zG .1
.
)( 1
1
1
0
Gain pour f = 0 : on fait x = 0 ou z = 1, il vient :
k
M
k
k
N
k
a
b
fG .1
)0( 1
1
1
0
I 2 Avantage et inconvénient des IIR
Avantage : filtres raides possibles avec peu de coefficient, du fait de la rétroaction, la
durée de la réponse impulsionnelle peut être longue mais avec très peu de coefficients.
Inconvénient :
Par construction, un filtre IIR ne peut pas être à phase linéaire (la réponse impulsionnelle
est forcement dissymétrique).

Tsn_3 DUT CNAM GEII 2
ed 2009
II filtre de base du premier ordre, passe bas
II 1 Relation temporelle et Fonction de transfert
yn = (1+a)xn - a yn-1
|a |< 1 et cas utile a < 0
1
.11
)(
zaa
Xn
Yn
zG
Avec
nTe
fech
f
xez ix
2
On trouverait alors aisément :
2
)2cos(.21
1
)( axa
a
xG
Gain pour f = 0 :
On fait x = 0 ou z = 1, il vient :
1)0( fG
Approximation pour x (ou f petit) :
On fait
2
4
1)2cos( 2
x
x
, il vient facilement :
)4()1(
1
1
)(
22
2
aa x
xG
C’est le module d’une fonction de transfert du premier ordre
c
x
x
j1
1
De fréquence de coupure à 3dB
a
a
xc
2
1
ou
a
a
fechfc
2
1
Attention à notation sans dimension x = f/fech, en fait la fréquence réelle de coupure en Hz
reste proportionnelle à fech.
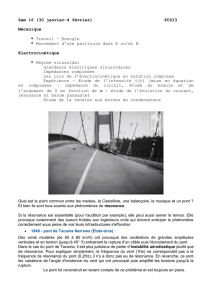
Exemple pour différentes valeurs de a, et pour deux cas le filtre analogique du premier
ordre équivalent au début.
a = -0,1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Premier ordre
analogique
a = -0,5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

Tsn_3 DUT CNAM GEII 3
ed 2009
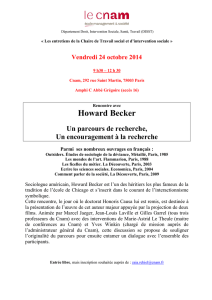
a = -0,900
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Premier ordre
analogique
a = -0,990
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Cas particulier
En réglant a de plus en plus proche de -1 (|a| restant inférieur à 1), on peut donc très
facilement affaiblir très fortement même des fréquences très basses, pour ne laisser que la
composante continue !
D’ou le nom de moyenneur en réglant a très voisin de -1.
II 2 Régime transitoire, stabilité
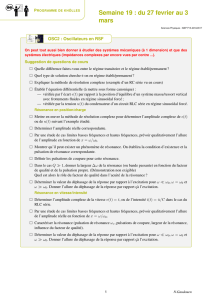
II 2 a Réponse impulsionnelle h
Si on envoi une seule impulsion x0=1, on calcule aisément d’après la relation de récurrence
1
)1(
nnn ahxah
et en partant de hn-1 = 0 :
h0 = 1+a h1 = (1+a)(-a) h2 = (1+a)(-a)2 … et donc :
n
naah ))(1(
Entrée x0=1, x1,x2… = 0
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Réponse pour a = -0,5
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
a = -0.9
050 100 150 200 250 300 350 400
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
a = -0,99
050 100 150 200 250 300 350 400
0
0.002
0.004
0.006
0.008
0.01
0.012

Tsn_3 DUT CNAM GEII 4
ed 2009
Durée du régime transitoire :
La durée de la réponse impulsionnelle est celle du régime transitoire, donc théoriquement
infini ! Si on raisonne comme en analogique, on peut dire que le régime transitoire est fini
quand on arrive à 95% de la valeur finale, donc pour :
n
n
na
aaa
y
h)(
)1( ))(1(
05,0
0
donc n.log(-a )= log(0,05) et
)log( 3,1 a
n
)log( 3,1
. 95%) à 0 re(de transitoiDurée a
fech
Il est évident que plus le filtre coupe en basse fréquence (a proche de -1) plus la réponse
impulsionnelle est longue et plus le régime transitoire est long (comme pour un filtre FIR).
Stabilité :
D’après la formule
n
naah ))(1(
on voit bien que si |a| > 1, la réponse impulsionelle hn
tend vers l’infini et donc instabilité !
Condition de stabilité : |a |< 1 et donc pour le cas utile -1 < a < 0
II 2 b Réponse à un échelon (réponse indicielle)
Une étude mathématique est faisable, on peut par contre en utilisant très simplement un
tableur tel qu’Excel tracer les réponses impulsionnelles (en faisant x0 = 1 seulement) et
indicielle (tous les xn à 1) pour une valeur de a et les comparer :
Réponse impulsionnelle pour a = -0,5
0
0,2
0,4
0,6
0,8
1
1,2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
xn
hn
Répponse indicielle pour a = -0,5
0
0,2
0,4
0,6
0,8
1
1,2
1
3
5
7
9
11
13
15
xn échelon
yn, réponse
indicielle
On voit que, comme pour tout filtre, la durée de la réponse impulsionnelle est égale au
temps de montée de la réponse à un échelon. Les allures (oscillantes ou non) sont également
ressemblantes)

Tsn_3 DUT CNAM GEII 5
ed 2009
III Filtre de base du second ordre
III 1 Relation de récurrence et fonction de transfert
221121 )1( nnnn yayaxaay
et
2
2
1
1
21
11
)(
zaza aa
Xn
Yn
zG
Avec a1 < 0 et a2 > 0 cas usuels
avec
x
ez
2
Il vient aisément:
xaxaaaa
aa
xG
4cos.22cos).1(21
1
)(
221
2
2
2
1
21
Gain pour f = 0
On fait z = 1, il vient directement :
1)0( fG
Etude des extremums
On obtient les extremums en dérivant par rapport à x, donc pour :
xaxaa
4cos.4.22cos.2).1(2 221
= 0
Or on connaît une formule magique : cos(2k) = 2sin(k)cos(k)
Donc pour :
02cos4)1().2sin( 221 xaaax
Donc soit:
0)2sin( x
ou
2/kx
, donc x = 0,5 (max utile avant repliement de spectre)
ou
02cos4)1( 221 xaaa
donc
2
214)1(
2cos aaa
x
Donc deux régimes possibles selon que cette équation peut se résoudre ou non :
III 1 a Régime sans maximum, donc sans résonance si
1
4)1(
2
21
aaa
La courbe est « maximalement plate » à la
limite :
2
2
114a
a
a
(A rapprocher d’un Filtre de Butterworth en
analogique).
a1= -1,2 a2 =0,4286 max plat
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%