Examen de Physique : Sismomètre, Filtres, Circuits RLC, Mécanique

PCSI. 01/02. Durée 4 heures. Physique. Devoir surveillé N°5.
Il est rappelé que votre copie est destinée à être lue et corrigée. En conséquence, une présentation claire et
lisible est recommandée. Il en sera tenu compte dans la notation.
Les questions sont numérotées. Les réponses à ces questions devront être données sous forme littérale la
plus simplifiée possible, encadrées, avant toute application numérique. Toute réponse non justifiée sera
considérée comme fausse.
Problème 1. Modélisation d'un sismomètre, réponse fréquentielle
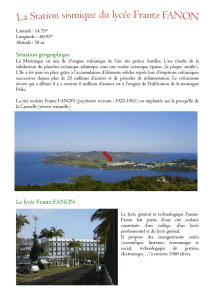
Le principe d'un sismomètre est schématisé sur la fig.1. Un ressort (1) de masse négligeable, dont la
réponse en élongation, linéaire, est caractérisée par une raideur k, est suspendu à un boîtier rigide. Un
solide (2), de masse m, est accroché à l'autre extrémité de ce ressort. Une partie de ce solide est solidaire
d'un amortisseur (3) exerçant sur (2) la force de frottement fluide
f hv
, où h est une constante,
x
dx
vu
dt
la vitesse de translation de (2) par rapport au boîtier et
x
u
le vecteur unitaire porté par l'axe Ox,
vertical, orienté vers le haut, et fixe par rapport au boîtier. L'origine O de cet axe correspond au point
d'attache de (2) dans sa position d'équilibre lorsque le boîtier est immobile sur le sol, ce dernier formant
un repère galiléen. On définit aussi un axe O'X vertical et fixe dans un référentiel galiléen (celui du sol
par exemple). On étudie la variable x(t) lorsque le boîtier reçoit une onde sismique, supposée verticale et
produisant un mouvement de boîtier repéré par X(t) : l'onde sismique est ainsi caractérisée par X(t) et la
réponse du sismomètre est caractérisée par x(t).
1. Justifier soigneusement l'établissement, dans le référentiel lié au boîtier de l'équation
différentielle liant les variables x(t) et X(t) :
22
2
0
22
2
d x dx d X
x
dt dt dt
, où
0k
m
est la
pulsation propre du sismomètre et, par définition,
2m
h
la constante de temps relative à
l'amortissement.
2. On considère une onde sismique sinusoïdale et de pulsation
. En régime forcé, la fonction x(t)
est sinusoïdale elle aussi, et de même pulsation. Établir l'expression de la fonction de transfert
mécanique
()m
m
x
Hj X
. On suppose désormais que
01
; déterminer alors l’expression de
()Hj
en fonction de la pulsation réduite
0
u
.
3. Tracer l'allure des diagrammes de Bode, en amplitude et en phase, de cette fonction de transfert
en fonction de log u ; préciser les équations des asymptotes. Quel type d'opérateur électronique
possède une réponse fréquentielle semblable ? Quel est son comportement suivant les deux cas :
0
ou
0
?

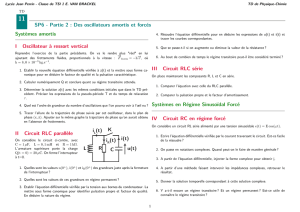
4. La pulsation propre du sismomètre étant
0
=20 rad/s, cet appareil détecte une onde sismique
sous la forme de la fonction périodique x(t) reproduite en fig. 2 ; l'amplitude est en unité
arbitraire.
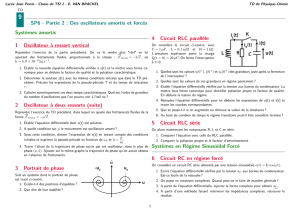
L'application d'un algorithme de transformée de Fourier à x(t) fournit les spectres de pulsations
significatives, en amplitude et en phase, tracés en figure 3.
À partir de cette figure, exprimer le développement en série de Fourier sous forme d'une somme
finie de cosinus :
0
( ) cos( )
nn
x t c c n t
.
5. En utilisant la fonction de transfert
()Hj
, déduire le développement en série de Fourier de
l'excitation
' ' '
0
( ) cos( )
nn
X t c c n t
. Le résultat sera présenté en complétant le tableau 1
jusqu'à n= 5. Les angles
'
n
seront exprimés en radian.
Pensez-vous que ce résultat puisse représenter une onde sismique réelle ?
6. Comment devrait-on modifier les caractéristiques du sismomètre afin que l'enregistrement de
x(t) permette de déduire directement X(t) ?
7. En considérant ce que serait l'allure du diagramme de Bode en amplitude de la fonction de
transfert pour
01
, expliquer pourquoi ce choix (
01
) doit être évité.

Problème 2. Filtre du second ordre. Facteur de qualité.
On étudie le filtre à AO, supposé idéal et en fonctionnement linéaire.
1. Déterminer la fonction de transfert complexe
()m
m
Vs
Hj Ve
de ce filtre en régime harmonique
de pulsation
en fonction de
, R, Co et C, puis en fonction des paramètres
C
nCo
et
x = RC
2. Déterminer la pulsation
0
du signal d’entrée pour laquelle le gain est maximal. Quel est alors
le déphasage
de la tension de sortie par rapport à la tension d’entrée ?
3. Déterminer, en fonction de R, C, Co le gain maximal Hmax, la bande passante f de ce filtre et
son facteur de qualité Q.
4. Tracer le diagramme de Bode en gain en fonction de log x dans le cas où n > 1.
Problème 3. Réponse d’un circuit RLC à deux mailles à un échelon de tension.
Dans le montage qui suit, le condensateur est déchargé à l’instant t = 0 où on ferme l’interrupteur K. La
résistance du générateur de tension de f.é.m E constante est négligeable.
On a :
L
RC R
et
21
oLC
.
1. Déterminer en fonction de
et
o l’équation différentielle vérifiée par le courant i2(t).
2. Déterminer l’expression de i2(t) en fonction de E, R,
et
o dans le cas d’un faible
amortissement.
Faire les applications numériques dans le cas où :
L = 1,0 H ; C = 10 F ; R = 1,0 k et E = 200 V.
3. Déterminer la valeur du courant i2min et la tension Umax aux bornes du condensateur.

Problème 4. Bille dans un tube.
On envisage la situation d'une bille B, de masse m, quasi-ponctuelle, soumise à la pesanteur et susceptible
de déplacements à l'intérieur d'un tube cylindrique mince T, de longueur 2l, effectuant des mouvements
caractérisés par une vitesse angulaire
autour d'un axe contenant son centre O. L’accélération de la
pesanteur est
g
, de module g constant, et dirigée selon la verticale descendante.
On note
r OP
le rayon vecteur de la position de B dans T à l'instant t, et r = OP la distance OP.
Les grandeurs ro et
o
r
caractérisent la position et la vitesse radiale de B à l'instant initial t = 0.
Le tube T est dans le plan horizontal ( x , y ) et tourne autour de l'axe Oz à la vitesse angulaire
constante.
A. Les mouvements de la bille B ont lieu sans frottements.
1. Etablir l'équation différentielle en r du mouvement de B.
2. Intégrer cette équation pour les conditions initiales ro et
o
r
.
3. Etablir l'expression du temps
que mettra B pour sortir de T.
4. Application numérique : Calculer
pour l = 0,1 m ; ro = 0,01 m ;
o
r
= 0 ;
= 2 radians.s-1.
B. Les mouvements de la bille B sont soumis à une force de frottement solide de coefficient
. On a
alors, lorsqu’il y a mouvement, la relation suivante :
RT =
RN où RN est la composante normale à la tige de la réaction
R
et RT la composante tangentielle.
5. Etablir l'équation différentielle en r du mouvement de B.
6. En déduire la loi
()r f r
liant la vitesse radiale et la position de B pour la condition suivante
( 0)rr
=
o
r
.
On posera que g >> 2
v pour résoudre l’équation différentielle obtenue qui n’est pas linéaire.
7. On constate que B s'arrête à la cote r = r1.
Cette constatation expérimentale permet-elle de justifier l’approximation effectuée en 6 ?
En déduire l'expression du coefficient de frottement
en fonction de g,
, vo et r1.
8. Application numérique: Calculer
pour que B s'arrête au bout du tube, avec g = 9,81 m.s-2,
l = 0,1 m,
o
r
= 0,5 m.s-1,
= 2 radians.s-1.
1
/
4
100%