Moteurs chaotiques

Moteurs chaotiques
Introduction
Le chaos est un phénomène d’un aspect aléatoire dont on ne connaît pas son évolution dans le temps,
cependant il obéit aux lois de la physique et reste déterministe. Certains systèmes se comportent de manière
chaotique telle que la convection dans le manteau terrestre, le robinet qui goutte, un pendule excité par un
champ magnétique … Les systèmes chaotiques sont très sensibles aux perturbations même infinitésimales
ainsi qu’aux conditions initiales.
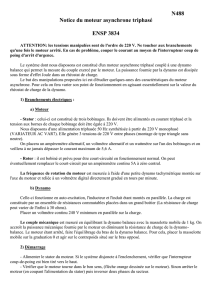
Dans la simulation numérique de gauche, les deux courbes représentent le même système chaotique affecté
par deux conditions initiales très proche, on remarque qu’elles évoluent d’abord de la même façon puis très
vite leur comportement devient très différent. Dans la simulation de droite on compare l’évolution dans le
temps d’un système harmonique (en rouge) avec un système chaotique (en bleu) qui est plus complexe et
non périodique.
Un système composé de dynamo et de moteurs illustrerait les phénomènes d’instabilités et de bifurcations.
En partant du principe qu’à partir d’un travail mécanique, on génère un courant dans une dynamo couplée à
un autre moteur nous donne des régimes stationnaire et oscillatoire instables. On fera l’analogie avec une
dynamo de Bullard couplée à un disque de Faraday soumis à un champ magnétique constant B0 pour mieux
comprendre théoriquement l’évolution du système (montage non réalisable expérimentalement) .
L’obtention des différents régimes dépend des paramètres de contrôle. Si on fixe la vitesse de rotation de la
dynamo on a une bifurcation de co-dimension deux, le régime est soit stationnaire soit oscillatoire dans ce
dernier cas le courant I et la vitesse de rotation du disque oscillent et sont déphasés. Si on fixe la valeur du
couple de la dynamo, le système évolue avec trois degrés de liberté dans ce cas on a transitions de régimes :
stationnaire, oscillatoires (harmonique ou anharmonique) et un régime chaotique.

Partie théorique :
Notion de bifurcation :
Une bifurcation est la transition d’un état stable à un autre état, il y a quatre type de bifurcations :
Les bifurcations « pitchfork ». Un équilibre stable se déstabilise en un équilibre instable, et deux
équilibres stables sont créés. Cette transition peut se faire de façon supercritique (de façon continue
et prévisible) ou sous-critique (discontinue, avec des phénomènes d’hystérésis).
Les bifurcations « saddle-node ». Deux points d'équilibres existent (un stable et un instable) avant la
bifurcation. Après la bifurcation, plus aucun équilibre n'existe.
Les bifurcations de Hopf. Ce sont des bifurcations oscillantes.
Les bifurcations de doublement de période. Ce sont des bifurcations qui mènent à des
comportements chaotiques. Elles peuvent par exemple s'obtenir en faisant rebondir une balle de
ping-pong sur une surface oscillante, et en augmentant la fréquence d'oscillation.
Dynamo Bullard, disque de Faraday :
Disque de Faraday :
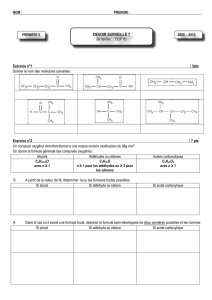
On considère un disque conducteur de rayon a soumis à un champ
magnétique externe B0, en série avec une résistante R ( cf Figure 1)
, le courant électrique induit est I=e/R où e est la force
électromotrice e= 1/2 Ωa²B0. Ce courant tend à amplifier le champ
B0 ou à le diminuer cela dépend de la direction de la rotation du
disque. La loi d’Ohm nous donne :
L dI/dt + RI = e = MΩI (1)
Où M est la mutuelle entre le disque et les balais, et L l’inductance
du circuit. La solution stable de l’équation est trivial : I=0, le
courant I ainsi que le champ magnétique B augmente
exponentiellement à partir d’un Ω critique Ω>Ωc=R/M.
I = I0*exp( ( ( MΩ – R ) / L ) t )
Le moment d’inertie, les forces de frottement ainsi que la force de Lorentz s’opposant à la direction du
mouvement, tendent à décélérer la rotation du disque et donc à diminuer le courant I selon l’équation :
J dΩ/dt = G – kΩ – MI² (2) équation du mouvement de rotation , k est le coefficient de frottement.
On multiplie l’équation (1) par I et on l’additionne à l’équation (2) multipliée par Ω ce qui nous donne :
d/dt ( JΩ² + LI² ) / 2 = ( Γ – kΩ ) Ω – RI² (3) , Γ est le couple de force
les solutions sont stationnaires pour I=0 (trivial) :
si Γ < Γc =k*R/M, Ω= Γ /k

et si Γ > Γ c Ω = Ω c et I²=( Γ - Γ c)/M
La bifurcation est stationnaire pour Γ = Γ c.
Dynamo Bullard couplée au disque :
On impose un travail mécanique à la dynamo, la vitesse angulaire de rotation Ω1 augmente jusqu’à une
valeur critique Ωc à partir de laquelle une perturbation infinitésimale donne naissance à un courant
électrique.
La dynamo est couplée au disque de Faraday, le disque est mis en mouvement grâce au couple de la force de
Lorentz F= q v ^ B, la loi d’Ohm nous donne :
L dI/dt = ( MΩ1 – R ) I – AB0Ω2 (3), où Ω1 est la vitesse de rotation de la dynamo et Ω2 vitesse de rotation
du disque et A = a² / 2
Les équations du mouvement de rotation de la dynamo et du disque sont :
J dΩ1/dt = Γ – kΩ1 – MI²
J dΩ2/dt= A*B0- kΩ2 (4)
.
On fixe Ω1, le système est stable pou I=0. On cherche des solutions de la forme I=I0exp(st) et Ω2= Ω
20exp(st)
A partir des équations (3) et (4) , on obtient :
JLs² + ( kL + JR – JMΩ1 ) s + k ( R -MΩ1 ) + ( AB0 )²=0
Le régime est stationnaire instable lorsque les termes en s s’annulent ce qui nous donne :
K( R – Ω1M ) + ( AB0 )² = 0 donc Ω1 = Ω1c = R / M + ( AB0 )² / kM

Le coefficient de s est donc positif : kL + JR – JMΩ1 > 0 donc (AB0)² < k²L / J.
Ce qui fait que lorsque le champ magnétique B0 est suffisamment petit, la bifurcation stationnaire reste
inchangée pour I=0.
En augmentant la vitesse de rotation Ω1, on a deux solutions imaginaires pures s= iω0/-iω0 , le coefficient de
s devient négatif kL+JR-JMΩ1<0 et (AB0)²> k²L/J. Dans ce cas, le régime oscille avec une pulsation ω0 et en
résulte d’une bifurcation de Hopf (bifurcation oscillatoire). Pour de grandes valeurs de B0, le courant I et la
vitesse de rotation Ω2 oscillent. Le système converge en un cycle limite lorsque la vitesse de rotation Ω1
n’est plus fixée. Dans l’espace de phase des deux paramètres Ω1 et B0 dans lequel les deux régimes ont lieu
en même temps on a (AB0)²=k²L/J et Ω1= R/M + kL/JM, dans ce cas la bifurcation est de co-dimension deux.
Montage expérimental :
Le principe du montage est de mettre en série deux moteurs, le premier jouera le rôle de la dynamo Bullard
et le second celui du disque de Faraday, on utilisera également un troisième moteur afin d’imposer une
vitesse de rotation constante à la dynamo.
Description d’un moteur universel :
Le moteur est composé d’un rotor et d’un stator, le rotor est une structure ferromagnétique cylindrique
autour de laquelle on entoure des bobines, une fois que le courant circule dans les bobines, un champ
magnétique est produit et donc il y a apparition des pôles nord et sud. Au milieu du rotor il y a un
commutateur connecté à deux brosses, celles-ci sont liées à un générateur de courant et sont donc chargées
positivement et négativement. Le stator est la structure ferromagnétique entourée par des bobines dans
lesquelles un courant Is y circule ( le stator peut être composé d’aimants permanent mais ça ne nous sera pas
utile) et donc il y a aussi apparition de deux pôles : nord et sud, ce stator entoure le rotor. Le pôle nord du
rotor et sud du stator s’attirent ce qui met le rotor en mouvement à l’intérieur du stator, à une certaine
position les brosses et le commutateur ne sont plus en contact. Lorsque les brosses et le commutateur sont
de nouveau en contact, chaque partie du commutateur est en contact avec la brosse de charge opposée à

celle en contact précédemment, alors les pôles du rotor s’inversent et le nouveau pôle sud se retrouve près
du pôle sud du stator, il y a donc répulsion … etc. Ainsi le moteur se met en rotation continue dans le stator.
Le stator crée un flux magnétique Ф(Is) dans le rotor, la valeur du champ dépend du nombre de tours de la
bobine et de la géométrie du circuit, lorsque le rotor tourne à une vitesse angulaire Ω une tension est
générée U= Ω Ф (Is) entre les deux brosses.
Si on impose une vitesse Ω au rotor et qu’une résistance R est connectée aux brosses, le courant satisfait
l’équation qu’on obtient à partir de la loi d’Ohm : LdI/dt= Ω Ф (Is) – RI où L est l’inductance des bobines.
Si on considère que I=Is et que Ф (Is) varie linéairement avec le courant, l’équation mécanique de rotation est
de : J dΩ1/dt = Γa - IФ(Is)
Où Γ a est la somme des couples de la force de frottement et de la force appliquée.
Ф(I) = f0 tanth ( I / I0 )
Différents régimes d’une dynamo :
La dynamo jouant le rôle d’un moteur, n’est branchée à aucun générateur de courant, le courant est généré
à partir d’un travail mécanique c'est-à-dire de la rotation de rotor, on opère de deux manière : soit en
contrôlant le paramètre de la vitesse de rotation Ω ou du couple Γ.
En fixant la vitesse de rotation :
L’expérience nous dit que lorsqu’on augmente la vitesse Ω jusqu’à un certain seuil, une transition de courant
se fait. En diminuant Ω le courant décroît également sans passer par une transition. Une hystérésis est
formée en traçant I(Ω). Alors que théoriquement, la bifurcation se fait à une vitesse critique Ωc= RI0/f0 sans
passer par une hystérésis, le courant varie de I=0 pour Ω <Ωc à I = racine(Ω-Ωc) pour Ω>Ωc.
Cette différence est due au fait de la présence d’un champ rémanent et de la relation entre Ф(Is) et Is
En fixant le couple :
La transition du courant en fonction du couple est continue et forme une bifurcation en fourchette.
L’équation mécanique du rotor est : JdΩ1/dt = Γa – IФ(Is)
Si on fixe le paramètre O la bifurcation est sous-critique, et si le couple est fixée la bifurcation est sur-critique
……..
Dynamo couplée à un moteur :
Vitesse de rotation constante : Bifurcation de co-dimension deux
On impose un courant Is dans le stator du moteur constant, ce qui produit un champ magnétique B0. Une
fois que la dynamo est en marche, elle génère un courant I dans le rotor du moteur et donc le met en
mouvement.
On fait varier Ω1 :
 6
6
1
/
6
100%