SCAO_VOL4_DESS

Imprimé le 15/04/17
UNIVERSITÉ DE LA MÉDITERRANÉE - AIX-MARSEILLE II
DESS AIR & ESPACE
Système de Contrôle d’Attitude et d’Orbite
Volume IV – Techniques Inertielles
Robert GUIZIOU
Mis à jour le 15 avril 2017
Technopôle de Château-Gombert
60, rue Joliot Curie - 13453 MARSEILLE CEDEX 13 – Tél : 04.91.11.38.02 - Fax : 04.91.11.38.38

S.C.A.O. – Volume IV Dess Air & Espace
Page 2

Dess Air & Espace S.C.A.O. – Volume IV
Page 3
SOMMAIRE
1 NOTIONS DE GYROSCOPIE – COUPLE GYROSCOPIQUE .................................................................... 5
1.1 CADRE DE LA GYROSCOPIE ? .......................................................................................................................... 5
1.1.1 Cadre et hypothèses .............................................................................................................................. 5
1.1.2 Hypothèses et notations ......................................................................................................................... 6
1.2 MISE EN EQUATIONS ...................................................................................................................................... 8
1.2.1 Moment cinétique .................................................................................................................................. 8
1.2.2 Théorème du moment cinétique ............................................................................................................. 8
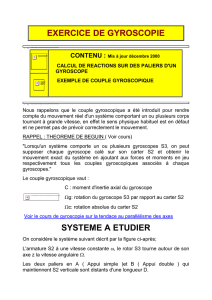
1.2.3 Notion de couple gyroscopique ............................................................................................................. 9
1.2.4 Interprétation du couple gyroscopique ................................................................................................. 9
1.2.5 Paradoxe gyroscopique ....................................................................................................................... 10
1.3 APPROXIMATION GYROSCOPIQUE ................................................................................................................ 10
1.4 NOTION DE DERIVE ...................................................................................................................................... 12
1.5 EXEMPLES .................................................................................................................................................... 12
1.5.1 Résolution physique ............................................................................................................................ 13
1.5.2 Résolution classique ............................................................................................................................ 13
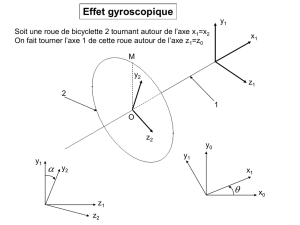
2 EQUATIONS DE LA GYROSCOPIE EXPRIMEES EN ANGLES D’EULER ......................................... 15
2.1 DESCRIPTION DU MONTAGE ......................................................................................................................... 15
2.1.1 La plate-forme ..................................................................................................................................... 15
2.1.2 Montage de cardan idéal ..................................................................................................................... 15
2.1.3 Les paramètres .................................................................................................................................... 17
2.1.4 Les efforts en jeu ................................................................................................................................. 17
2.2 EQUATIONS DU MOUVEMENT A L’ORDRE 1 .................................................................................................. 18
2.2.1 Cas général ......................................................................................................................................... 18
2.2.2 Calcul du moment reçu par le gyroscope S3........................................................................................ 19
2.3 EXEMPLES CAPITAUX POUR LES TECHNIQUES INERTIELLES .......................................................................... 20
2.3.1 Gyroscopes de références inertielles ................................................................................................... 20
2.3.2 Accéléromètre gyroscopique ............................................................................................................... 21
2.3.3 Boîtier accélérométrique ..................................................................................................................... 22
2.4 RETOUR SUR LES SUSPENSIONS .................................................................................................................... 22
2.4.1 Suspension électrique .......................................................................................................................... 23
2.4.2 Suspension hydrodynamique ............................................................................................................... 23
2.4.3 Suspension dynamique accordée ......................................................................................................... 23
3 PRINCIPE D’UNE CENTRALE INERTIELLE ........................................................................................... 25
3.1 PRINCIPE DE REALISATION ........................................................................................................................... 25
3.1.1 Matérialisation du repère absolu Ra ................................................................................................... 26
3.1.2 Alignement et initialisation de la centrale........................................................................................... 27
3.1.3 Notion de plate-forme stabilisée.......................................................................................................... 29
3.2 MESURE DE LA ROTATION ............................................................................................................................ 29
3.3 LE NAVIGATEUR INERTIEL ........................................................................................................................... 30
3.3.1 Equipements nécessaires ..................................................................................................................... 30
3.3.2 Fonctionnement du navigateur ............................................................................................................ 31
3.3.3 Erreurs ................................................................................................................................................ 32
3.4 OU SE RENSEIGNER ? .................................................................................................................................... 33

S.C.A.O. – Volume IV Dess Air & Espace
Page 4
3.4.1 Entreprises .......................................................................................................................................... 33
3.4.2 Spécialiste français et bibliographie ................................................................................................... 33
4 ACCELEROMETRES ..................................................................................................................................... 35
4.1 ACCELEROMETRE AVEC MASSE EN TRANSLATION ........................................................................................ 35
4.1.1 Schéma ................................................................................................................................................ 35
4.1.2 Théorie ................................................................................................................................................ 36
4.1.3 Conclusion .......................................................................................................................................... 36
4.2 AUTRES PRINCIPES ....................................................................................................................................... 37
4.2.1 Accéléromètre à quartz ....................................................................................................................... 37
4.2.2 Accéléromètre à cordes vibrantes ....................................................................................................... 38
4.2.3 Accéléromètre pendulaire ................................................................................................................... 38
5 GYROMETRES ................................................................................................................................................ 39
5.1 PRINCIPE DU GYROSCOPE 1-AXE .................................................................................................................. 39
5.1.1 Description .......................................................................................................................................... 39
5.1.2 Equipements annexes .......................................................................................................................... 40
5.1.3 Relation fonctionnelle exacte .............................................................................................................. 40
5.2 LE GYROSCOPE INTEGRATEUR 1-AXE ........................................................................................................... 40
5.3 LE GYROMETRE ............................................................................................................................................ 41
5.4 LE GYROMETRE LASER ................................................................................................................................. 41
6 PRINCIPE DE RELATIVITE D’EINSTEIN-GALILEE ............................................................................. 43
6.1 PRINCIPE DE RELATIVITE D’EINSTEIN-GALILEE ........................................................................................... 43
6.1.1 Notion de force spécifique ................................................................................................................... 43
6.1.2 Question posée par Einstein ................................................................................................................ 44
6.1.3 Réponse ............................................................................................................................................... 44
6.2 CONSEQUENCES DE CE PRINCIPE .................................................................................................................. 44
6.2.1 Commentaires ..................................................................................................................................... 44
6.2.2 Comment met-on en évidence g sur Terre ? ........................................................................................ 45
6.2.3 Qu’est-ce que l’état d’apesanteur ? .................................................................................................... 45

Dess Air & Espace S.C.A.O. – Volume IV
Page 5
1 NOTIONS DE GYROSCOPIE – COUPLE GYROSCOPIQUE
Nous présentons dans les cours qui suivent, les fondements de la gyroscopie. C'est une partie de la
mécanique classique souvent délaissée parce que très spécialisée, demandant un sens mécanique
inhabituel et nécessitant des approximations, au demeurant fort justifiées mais qui déplaisent quelquefois
au mécanicien quelquiefois trop mathématicien.
Les applications de la gyroscopie et à travers elle des techniques inertielles ont révolutionné les
systèmes de pilotage, de guidage et de navigation parce qu'offrant une autonomie totale de manœuvre
même à des distances considérables de la Terre ou dans des conditions d'environnement très sévères
(Rentrée de capsules, sous-marins,...).
1.1 Cadre de la gyroscopie ?
1.1.1 Cadre et hypothèses
En pratique, dès qu'un système comporte un corps tournant, on peut parler de gyroscopie. Cependant
l'expérience montre que les effets étonnants et réellement "utiles" n'apparaissent que dans deux
circonstances :
Un solide unique est en mouvement de rotation, quelle que soit sa rotation, le mouvement n'est
pas alors perturbé par un autre système. Dans le cas particulier où le moment des forces
extérieures, calculé au centre d'inertie est nul, l'étude relève alors de la théorie de Poinsot
1
. On
peut alors rappeler qu'en particulier si la rotation axiale se fait autour du grand axe d'inertie,
l'orientation de cet axe reste fixe dans un repère inertiel. De plus dans le cas d'une grande
vitesse de rotation axiale, le mouvement présente alors une très grande stabilité, appelée
raideur gyroscopique qui se manifeste par des mouvements très lents de l'axe du gyroscope,
donc des vitesses angulaires très faibles et donc des accélérations angulaires encore plus
faibles. Nous conserverons cette hypothèse durant tout le cours, elle sera justifiée à posteriori.
Le corps tournant appartient à un système complexe et présente :
- soit un moment d'inertie axial très important,
- soit une rotation axiale très rapide, par rapport aux rotations possibles des autres parties du
système,
- soit les deux.
Dans tous les cas, on parlera d'un "moment cinétique H = I
important", avec une rotation de 250 à 3000
t/s et un moment cinétique de 10-3 à 1 N.m/s.
Intuitivement comparé à la quantité MV qui caractérise l'inertie en translation, ici c'est I qui caractérise
l'inertie en rotation.
1
Cf. SCAO – Vol 1, chapitre 1 – Mouvement de Poinsot
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
1
/
46
100%