mouvement dans un champ de forces centrales conservatives

mouvement dans un champ de forces
centrales conservatives
Table des matières
1 forces centrales conservatives 2
1.1 définitions..................................... 2
1.2 exemples de forces centrales conservatives . . . . . . . . . . . . . . . . . . . 2
2 propriétés des mouvements à force centrale 3
2.1 conservation du moment cinétique . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 planéité du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 intégrale première du mouvement . . . . . . . . . . . . . . . . . . . . 3
2.1.3 Loidesaires................................ 4
2.2 conservation de l’énergie mécanique . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Intégrale première du mouvement . . . . . . . . . . . . . . . . . . . . 4
2.2.2 Énergie potentielle effective . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.3 États de diffusion, états liés . . . . . . . . . . . . . . . . . . . . . . . 4
3 mouvement dans un champ de forces centrales newtonien 5
3.1 définition ..................................... 5
3.2 équation de la trajectoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.3 relation entre l’énergie mécanique, l’énergie potentielle effective et le type
detrajectoire ................................... 6
3.3.1 cas d’une force attractive . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3.2 cas d’une force répulsive . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.4 étude du mouvement elliptique . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.4.1 loisdeKepler............................... 8
3.4.2 énergie et demi grand axe . . . . . . . . . . . . . . . . . . . . . . . . 9
3.5 cas particulier des trajectoires circulaires . . . . . . . . . . . . . . . . . . . . 9
3.5.1 vitesse, énergie mécanique et période . . . . . . . . . . . . . . . . . . 9
3.5.2 vitessescosmiques ............................ 9
1

Le mouvement d’un point matériel soumis à une force constamment dirigée vers un point
fixe, qu’on appelle « force centrale », est un cas fréquent en physique. Cette situation se
rencontre en particulier :
- à l’échelle microscopique, avec, dans le cadre de la mécanique classique, par exemple, le
cas d’un électron soumis à l’action d’un noyau atomique,
- à l’échelle astronomique lorsque nous observons, par exemple, le mouvement des astres
soumis à la force de gravitation du Soleil....
Ce dernier cas a été étudié par Kepler, qui énonça trois lois expérimentales sur le mouve-
ment des planètes (1604 à 1618) à la suite d’études systématiques d’observations de Tycho
Brahé. C’est à partir de ces lois que Newton a édifié sa théorie mécanique.
1 forces centrales conservatives
1.1 définitions
Soit O un point fixe du référentiel R d’étude. Lorsqu’en tout point M de l’es-
pace, un point matériel est soumis à une force −−−→
F(M)colinéaire au vecteur −−→
OM,
on dit qu’il existe dans l’espace un champ de forces centrales : en coordonnées
sphériques, −→
F=F(r)−→
er
- O est appelé centre de force.
- Un champ de forces centrales est un champ de forces conservatives si −→
Fdérive
d’une énergie potentielle :
δW (−→
F) = −dEp
Comme −−→
OM =r−→
er,d−−→
OM =dr−→
er+rd−→
eravec −→
er.d−→
er= 0
δW (−→
F) = −→
F .d−−→
OM
δW (−→
F) = Fr.dr
F(r) = −dEp
dr
1.2 exemples de forces centrales conservatives
1. force de gravitation
Soient deux points matériels M1et M2, de masses gravitationnelles (supposées égales
à leurs masses inertes) m1et m2
−−−→
F1→2=−−−−→
F2→1=−G m1m2
(M1M2)2
−−−−→
M1M2
M1M2
avec G= 6,67.10−11 kg−1. m3. s−2
Dans le cas où Mde masse mest attiré par un centre de force fixe Odans le
référentiel d’étude, de masse m0m, M est soumis à la force centrale
−→
F=−G m0m
r2
−→
er
δW (−→
F) = −→
F .d−−→
OM =−Gmm0
r2
−→
er.(dr −→
er+r d−→
er) = −Gmm0dr
r2=−dEp
2

avec Ep=−Gmm0
ren prenant Ep(∞)=0
2. force électrostatique
Soient les points matériels M1de charge q1et M2de charge q2
−−−→
F1→2=−−−−→
F2→1=1
4π0
q1q2
(M1M2)2
−−−−→
M1M2
M1M2
avec 1
4π0
= 9.109S.I.
Dans le cas où Mde charge qet de masse mest attiré ou repoussé par un centre
de force fixe Odans le référentiel d’étude, de charge q0et de masse m0m, M est
soumis à la force centrale −→
F=1
4π0
q0q
r2
−→
er
δW (−→
F) = −→
F .d−−→
OM =
qq0
4π0
r2
−→
er.(dr −→
er+r d−→
er) = qq0
4π0
dr
r2=−dEp
avec Ep=
qq0
4π0
ren prenant Ep(∞) = 0
2 propriétés des mouvements à force centrale
Soit un point matériel M soumis dans le référentiel d’étude supposé galiléen à un champ
de forces centrales conservatives de centre O fixe.
2.1 conservation du moment cinétique
2.1.1 planéité du mouvement
D’après le théorème du moment cinétique en O,
d−−−−→
LO(M)
dt =
−−−−−→
MO(−→
F) = −−→
OM ∧−→
F=r−→
er∧F(r)−→
er= 0 ⇒−−−−→
LO(M) = −→
cte
le moment cinétique du point matériel M au centre de force O se conserve.
Comme −−−−→
LO(M) = −−→
OM ∧m−→
v=−→
0,−−→
OM et −→
vrestent perpendiculaires à −→
LO=−→
cte.−−→
OM
et −→
vsont donc contenus dans le plan perpendiculaire à −→
LO=−→
cte :
le mouvement est plan.
2.1.2 intégrale première du mouvement
Dans ce plan, choisissons les coordonnées polaires (r, θ), la base cylindrique correspondante
étant (−→
er,−→
eθ,−→
ez)−−→
OM =r−→
er−→
v= ˙r−→
er+r˙
θ−→
eθ
−−−−→
LO(M) = −−→
OM ∧m−→
v=mr2˙
θ−→
ez
comme −→
LO=−→
cte
r2˙
θ=cte =C
Cette relation est une intégrale première du mouvement, C est la constante des aires.
3

2.1.3 Loi des aires
L’aire balayée par le rayon vecteur −−→
OM pendant dt est
dA=1
2rk−→
er∧d(r−→
er)k=1
2r2|dθ|
La vitesse aréolaire dA
dt =1
2r2|˙
θ|=1
2|C|=cte
Les aires balayées pendant des durées égales sont égales. M accélère lorsqu’il
se rapproche du centre de force et ralentit lorsqu’il s’en éloigne.
2.2 conservation de l’énergie mécanique
2.2.1 Intégrale première du mouvement
−→
F=F(r)−→
erdérivant d’une énergie potentielle Ep(r), l’énergie mécanique se conserve
Em=1
2m( ˙r2+r2˙
θ2) + Ep(r) = cte
ce qui constitue aussi une intégrale première du mouvement
2.2.2 Énergie potentielle effective
Em=1
2m˙r2+1
2mr2˙
θ2+Ep(r)
1
2mr2˙
θ2=m
2r2(r2˙
θ)2=m
2r2C2
Em=1
2m˙r2+mC2
2r2+Ep(r)
L’énergie mécanique ne dépend plus que de ˙ret r:
- le terme 1
2m˙r2est appelé énergie cinétique radiale
- le terme mC2
2r2+Ep(r) = Ep,eff est appelé énergie potentielle effective
Em=1
2m˙r2+Epef f (r) = cte
2.2.3 États de diffusion, états liés
Le terme cinétique 1
2m˙r2étant positif, Em=cte est la plus grande valeur que puisse
prendre Epeff (r); les valeurs de rpour lesquelles Ep,eff > Emsont donc inaccessibles.
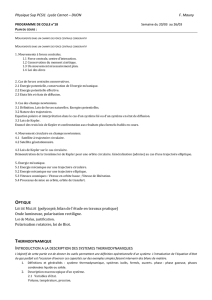
- Cas d’une force répulsive :
Pour une force centrale conservative répulsive, Ep(r) est décroissante et Epef f (r) l’est
4

aussi, ; on obtient une représentation graphique d’allure :
On se retrouve dans une configuration de barrière de potentiel : les valeurs de r au cours
du mouvement varient entre rmin et +∞. Le point M s’éloigne de O jusqu’à l’infini : on
parle d’état de diffusion
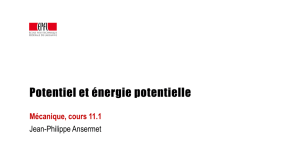
- cas d’une force centrale attractive :
Epeff étant la somme d’une fonction croissante et d’une fonction décroissante, elle peut
présenter un minimum, comme par exemple dans le graphique ci-dessous.
Dans le cas 1, on est ramené à un état de diffusion. Dans le cas 2, rmin ≤r≤rmax : on
parle d’état lié.
3 mouvement dans un champ de forces centrales newtonien
3.1 définition
Un champ de forces centrales est dit Newtonien s’il est de la forme −→
F=−α
r2
−→
er
L’énergie potentielle associée est de la forme Ep=−α
r+cte . Il est attractif si α > 0et
répulsif sinon.
exemple : le champ de gravitation d’un astre sphérique est newtonien, avec α=mMG
exemple 2 : le champ de forces électrostatiques engendré par une charge Q au point O
est newtonien, avec α=−1
4πε2
0
qQ
3.2 équation de la trajectoire
Soit un point matériel M de masse m soumis dans le référentiel d’étude, supposé galiléen,
à un champ de forces centrales newtonien dont le centre de force est O.
Le mouvement est plan. On se place donc en coordonnées polaires (r,θ).
D’après la relation fondamentale de la dynamique,
md−−−→
vM,R
dt =−→
F=−α
r2
−→
er
5
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%