1 Structures algébriques élémentaires (P. Aimé, 07/2016) Index 147

1
1 Structures algébriques élémentaires (P. Aimé, 07/2016)
. .
3
1 Quelques propriétés ensemblistes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Applications et champs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Entiers naturels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Opérations, demi-groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Ensembles et monoïdes ordonnés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Ensembles finis, infinis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Axiome du choix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Ensembles quotients, dénombrements (I) . . . . . . . . . . . . . . . . . . . . . . . . 28
2 Structure de groupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Situations/Modèles : compositions de permutations . . . . . . . . . . . . . . . . 33
Notion de groupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Morphismes de groupes, entiers relatifs . . . . . . . . . . . . . . . . . . . . . . . . . 38
Sous-groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Groupes ordonnés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3 Anneaux, corps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Structure d’anneau et de corps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Anneaux intègres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Anneaux et corps ordonnés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Arithmétique de Z. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4 Groupes (suite) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Sous-groupes distingués et quotients de groupes . . . . . . . . . . . . . . . . . . 64
Groupes monogènes et cycliques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Actions de groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Structure du groupe symétrique d’un ensemble fini . . . . . . . . . . . . . . . . 93
5 Constructions de corps (I) .........................................102
Corps des fractions d’un anneau commutatif intègre . . . . . . . . . . . . . . 102
Nombres rationnels et décimaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Nombres réels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Exponentielles entières, rationnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
6 Travaux dirigés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Logique et récurrence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Limites ensemblistes (L2/L3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Arithmétique élémentaire, cryptage . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Groupes, anneaux, corps, arithmétique : compléments. . . . . . . . . . . . . 128
L’anneau des entiers de Gauss (L1). . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Périodes et orbites : un exemple géométrique (L2). . . . . . . . . . . . . . . . 136
7 Annexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Comparaisons puissances/factorielles . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Axiome du choix : complément . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Cardinaux infinis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Réciprocité quadratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Table de Pythagore du groupe S
4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Un groupe simple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Algorithme d’Euclide-Bezout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Index 147


3
Chapitre 1
Structures algébriques élémen-
taires (P. Aimé, 07/2016)
Commençons par énoncer quelques "règles du jeu".
1) Toute activité de démonstration repose sur la donnée préalable d’une liste de propriétés
admises (axiomes) et d’une liste de termes premiers. Au niveau L1, cette liste est loin d’être
minimale, exhaustive et primitive.
A ce niveau, le sens des concepts en théorie des ensembles est fondé sur leurs représen-
tations concrètes, mais un excès de confusions entre expérience concrète et modèle mathé-
matique est nuisible aux raisonnements. Cette confusion est fréquente pour les questions de
dénombrement par exemple. Plus fondamentalement, il est difficile d’admettre que l’infini
est à la fois inaccessible à l’expérience, et nécessaire à la théorie, comme l’ensemble vide,
modèle de ce qui n’existe pas, et 0, son cardinal.
Autre exemple : les applications. Si l’on dit qu’une application d’un ensemble Xdans
un ensemble Yest définie par la donnée, pour chaque élément xde X, d’un élément yde Y
et un seul, le mot “donnée” peut évoquer un procédé expérimental, ou un procédé théorique
non précisé. Mais si une telle “donnée” va de soit, comment faire admettre qu’il se pose un
problème d’existence dans le cas particulier d’une “fonction de choix” comme on le verra au
§ 1-1-6 ?
Une première section de ce chapitre, au contenu très partiel, rassemble quelques points à
l’origine d’interrogations ou d’erreurs fréquentes au niveau L, en complément du vocabulaire
de base supposé connu.
Dans ces préacquis, citons les relations et opérations ensemblistes suivantes : inclusion,
inclusion stricte, complémentarité, réunion, intersection, produit.
Si Aest une partie d’un ensemble X,X\Aest le complémentaire de Adans X. En
particulier, si Xet Ysont deux ensembles, l’ensemble X\(X∩Y)est noté X\Y.
P(X)désigne l’ensemble des sous-ensembles d’un ensemble X.P(X)contient tou-
jours la partie vide ∅. Si Xn’est pas vide, les parties à un élément de Xsont les singletons
de X.
Deux parties A,Bde Xréalisent une partition de Xsi A∩B=∅et A∪B=X.
2) En ce qui concerne le contenu, rappelons que ce livre n’est pas un cours, mais une
ressource qui propose une mise en perspective des structures sous-tendues par une ou des
problématiques.
Pour ce chapitre, les questions sont “Qu’est-ce qu’un nombre entier, un nombre réel ?”,
la réponse ne se limite pas à une construction effective, elle traite de l’unicité.
Ceci conduit à présenter un minimum de propriétés des structures algébriques élémen-
taires : groupes, anneaux, corps.
D’autre part, la notionde générateur est centrale, pourles groupes comme pour les espaces
vectoriels. Pour les groupes, elle trouve ici sa motivation et ses applications dans les pro-
priétés arithmétiques des nombres entiers et des polynômes, ainsi que l’étude des permuta-

4Chapitre 1 Structures algébriques élémentaires (P. Aimé, 07/2016)
tions des objets d’un ensemble fini. Pour les espaces vectoriels (au chapitre 2), il s’agit des
relations entre les propriétés des vecteurs et applications linéaires et les calculs en coordon-
nées.
3) Enfin, disons un mot de l’ordonnancement des concepts. Pour l’étudiant, la struc-
ture d’espace vectoriel est plus familière que celle de groupe pour des raisons telles que son
ancrage dans le secondaire, son rôle en géométrie, en mécanique, et pour tous les calculs ma-
triciels. Ici, les groupes précèdent les espaces vectoriels. L’ordre hiérarchique des structures
n’est pas le meilleur pour un premier apprentissage, mais il est utile pour organiser les con-
naissances lors d’une première synthèse et en vue d’un approfondissement que l’on trouvera
au chapitre 5.
1.1 Quelques propriétés ensemblistes
1.1.1 Applications et champs
Cette section précise quelques idées à propos des applications et des champs, en lien avec
la structure d’ensemble produit ou d’ensemble somme. Après le concept d’ensemble, ceux
d’application et de champ sont sans doute les plus utilisés dans les enseignements des sci-
ences, à partir du collège, maisil faut bien reconnaitre que la mise en place de la formalisation
est plutôt étalée dans le temps. Plus de dix années d’études peuvent séparer les premières ma-
nipulations de transformations bijectives et une véritable définition de la dérivée particulaire
(qui relève du chapitre 21).
1.1.1.1 Applications
On désigne par Xet Ydeux ensembles non vides. Dans l’ensemble produit X×Y, on
s’intéresse aux sous-ensembles de la forme {x}×Y, pour x∈X.
Définition 1.1 Dans l’ensemble produit X×Y, pour tout x∈X, le sous-ensemble {x}×Y
est la fibre au dessus de x.
Un graphe fonctionnel sur X×Yest une partie non vide Γ⊂X×Ytelle que, pour
tout x∈X,Γ∩({x} × Y)soit un singleton (x, y).
Cet unique élément y∈Y, défini par x∈Xest noté y(x)ou y
x
, et appelé image ou
transformé de x. On dit alors que xest un antécédent de y.
Remarque 1.1 Si X
′
est une partie non vide de X,Γ
′
= Γ ∩(X
′
×Y)est un graphe
fonctionnel sur X
′
×Y.
Définition 1.2 Une application (ou fonction) est un triplet f= (X, Y, Γ), où Xest un en-
semble non vide appelé ensemble de définition (ou ensemble source) de f,Yest un ensemble
non vide appelé ensemble d’arrivée (ou ensemble but) de f, et Γun graphe fonctionnel sur
X×Y.
On dit que fest une application de Xdans Y.

Section 1 Quelques propriétés ensemblistes 5
Si X
′
est une partie non vide de X, l’application f
′
de X
′
dans Ydéfinie par Γ
′
est
appelée restriction de fàX
′
ou application induite par fsur X
′
.
La notation traditionnelle pour fest
f:X→Y
x−→ f(x) = y
x
.
et f|
X
′
pour f
′
.
L’ensemble des éléments de Yqui admettent un antécédent est noté f(X).
L’application fdéfinit une application (notée fpar abus) de P(X)dans P(Y)en posant
f(∅) = ∅et, si X
′
est une partie non vide de X,f(X
′
)est l’ensemble des éléments de Y
qui ont un antécédent dans X
′
.
Il est commode de noter f
−1
(y)l’ensemble (éventuellement vide) des antécédents d’un
élément y∈Y. Ceci ne suppose pas que f
−1
soit une application, cette notation ne doit pas
induire en erreur.
De même, pour toute partie Y
′
⊂Y, l’ensemble f
−1
(Y
′
), réunion des f
−1
(y), lorsque y
décrit Y
′
est une partie éventuellement vide de X.
Définition 1.3 Une application f:X→Yétant donnée, le sous-ensemble f(X)de Yest
l’image de f.
Avec Y=X, une partie non vide Ade Xest stable par une application fsi f(A)⊂A.
Si y∈Yet Y
′
⊂Y, la pré-image de y(resp. de Y
′
) est l’ensemble f
−1
(y)(resp.
f
−1
(Y
′
)).
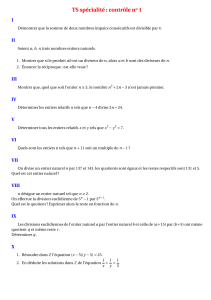
Définition 1.4 Supposons donnés : des ensembles X, Y, Z, des applications h:X→Z,
f:X→Y,g:Y→Z. On dit que hest composée de fet g(dans cet ordre), et l’on écrit
h=g◦fsi h(x) = g(f(x)) pour tout x∈X.
Observons que la relation h(x) = g(f(x)) ne suffit pas pour caractériser g. La proposi-
tion 1-19 apporte des précisions.
La relation h=g◦fest symbolisée par le diagramme
X f
→
Y
ց
h
↓g
Z
.
Définition 1.5 Cette représentation est appelée un diagramme commutatif, et l’on dit que
l’application gest une factorisation de hà travers f.
Définition 1.6 Si Xet Ysont deux ensembles non vides, les applications π:X×Y→X
définie par π(x, y) = xet π
′
:X×Y→Y, définie par π
′
(x, y) = ysont respectivement la
première et deuxième projection de X×Y.
Une section de π(ou de X×Y) est une application s:X→X×Ytelle que π◦s=I
X
.
Une section est donc de la forme s(x) = (x, y(x)), ce qui définit une application de X
dans Y.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
1
/
149
100%