MOUVEMENT DES SATELLITES ET DES PLANETES

http://sbeccompany.fr
MOUVEMENTS DES SATELLITES ET DES PLANETES
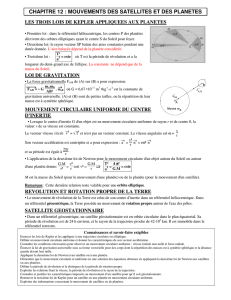
I – Les lois de Kepler
Johannes Kepler (1571-1630), astronome et physicien allemand, célèbre pour sa formulation
et sa vérification des trois lois du mouvement planétaire (1609). Ces lois sont maintenant
connues sous le nom de lois de Kepler.
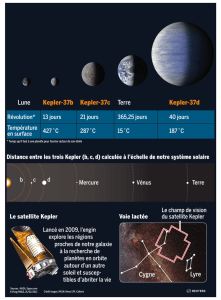
En se basant sur les idées de Nicolas Copernic (théorie héliocentrique des planètes, 1543), il a
montré que le système solaire était composé de neuf planètes et d’autres corps comme les
comètes par exemple. Pour qu’un corps appartienne au système solaire, il faut qu’il vérifie les
trois lois de Kepler appliquées au Soleil (voir ci-après).
Les travaux de Kepler ont servi à Isaac Newton pour démontrer l’attraction gravitationnelle.
v
1) Première loi de Kepler : loi des trajectoires
D
D
A
AN
NS
S
L
LE
E
R
RE
EF
FE
ER
RE
EN
NT
TI
IE
EL
L
L
LI
IE
E
A
AU
U
C
CE
EN
NT
TR
RE
E
D
DU
U
C
CO
OR
RP
PS
S
A
AT
TT
TR
RA
AC
CT
TE
EU
UR
R
,
,
L
LA
A
T
TR
RA
AJ
JE
EC
CT
TO
OI
IR
RE
E
D
DU
U
C
CE
EN
NT
TR
RE
E
D
DU
U
S
SA
AT
TE
EL
LL
LI
IT
TE
E
E
ES
ST
T
U
UN
NE
E
E
EL
LL
LI
IP
PS
SE
E
D
DO
ON
NT
T
L
LE
E
C
CO
OR
RP
PS
S
A
AT
TT
TR
RA
AC
CT
TE
EU
UR
R
E
ES
ST
T
L
L
’
’
U
UN
N
D
DE
ES
S
F
FO
OY
YE
ER
RS
S
.
.
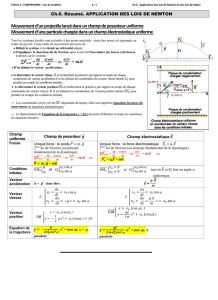
Application au système solaire : Dans le référentiel héliocentrique, les trajectoires de chaque
planète est une ellipse dont le Soleil est un foyer. Plus précisément, toutes les planètes à part
Mercure et Pluton ont des trajectoires circulaires.
2) Deuxième loi de Kepler : loi des aires
L
L
E
E
S
SE
EG
GM
ME
EN
NT
T
D
DE
E
D
DR
RO
OI
IT
TE
E
R
RE
EL
LI
IA
AN
NT
T
L
LE
E
C
CO
OR
RP
PS
S
A
AT
TT
TR
RA
AC
CT
TE
EU
UR
R
A
AU
U
S
SA
AT
TE
EL
LL
LI
IT
TE
E
B
BA
AL
LA
AI
IE
E
D
DE
ES
S
A
AI
IR
RE
ES
S
E
EG
GA
AL
LE
ES
S
D
DU
UR
RA
AN
NT
T
D
DE
E
D
DU
UR
RE
EE
ES
S
∆
∆
T
T
E
EG
GA
AL
LE
ES
S
.
.
Conséquences : quand le segment s’allonge, l’aire balayée restant la même, la vitesse
diminue.
Dans le cas d’une ellipse, la vitesse est plus grande quand le corps se rapproche du soleil.
Remarque : quand la trajectoire de la vitesse est circulaire, la norme de la vitesse est
constante.
F F’
A’
A
S
satellite
corps attracteur
F F’
A’
A
∆
t
∆t
1 2
A A
=
A
1
A
2

3) Troisième loi de Kepler : loi des périodes
D
D
A
AN
NS
S
L
LE
E
R
RE
EF
FE
ER
RE
EN
NT
TI
IE
EL
L
L
LI
IE
E
A
AU
U
C
CE
EN
NT
TR
RE
E
D
DU
U
C
CO
OR
RP
PS
S
A
AT
TT
TR
RA
AC
CT
TE
EU
UR
R
,
,
L
LE
E
R
RA
AP
PP
PO
OR
RT
T
E
EN
NT
TR
RE
E
L
LE
E
C
CA
AR
RR
RE
E
D
DE
E
L
LA
A
P
PE
ER
RI
IO
OD
DE
E
D
DE
E
R
RE
EV
VO
OL
LU
UT
TI
IO
ON
N
E
ET
T
L
LE
E
C
CU
UB
BE
E
D
DU
U
D
DE
EM
MI
I
G
GR
RA
AN
ND
D
A
AX
XE
E
a
a
=
=
F
FF
F’
’
D
DE
E
L
L
’
’
E
EL
LL
LI
IP
PS
SE
E
E
ES
ST
T
U
UN
NE
E
C
CO
ON
NS
ST
TA
AN
NT
TE
E
L
LI
IE
EE
E
A
AU
U
C
CO
OR
RP
PS
S
A
AT
TT
TR
RA
AC
CT
TE
EU
UR
R
.
.
2
3
T
constante
a
=
2
3
T
constante
r
=
II – Les référentiels
1) Le référentiel géocentrique
Il est constitué du centre de la Terre comme origine et de trois directions fixes allant du centre
de la Terre vers trois étoiles lointaines (elles sont si loin que l’on peut considérer leur position
fixé).
On utilise ce référentiel pour décrire les mouvements des satellites artificiels ou naturels. Ce
référentiel est galiléen. On peut appliquer les lois de Newton.
On pourrait définir le même référentiel pour n’importe quelle autre planète.
2) Le référentiel héliocentrique
Il est constitué du centre de la Terre comme origine et de trois directions fixes allant du centre
de la Terre vers trois étoiles lointaines (elles sont si loin que l’on peut considérer leur position
fixé).
On utilise ce référentiel pour décrire le mouvement des planètes autour du Soleil. Ce
référentiel. On peut appliquer les lois de Newton.
f

III – Caractéristique d’un mouvement circulaire uniforme
1) Définition
L
L
E
E
M
MO
OU
UV
VE
EM
ME
EN
NT
T
D
D
’
’
U
UN
N
S
SO
OL
LI
ID
DE
E
E
ES
ST
T
R
RE
EC
CT
TI
IL
LI
IG
GN
NE
E
U
UN
NI
IF
FO
OR
RM
ME
E
S
SI
I
S
SA
A
T
TR
RA
AJ
JE
EC
CT
TO
OI
IR
RE
E
E
ES
ST
T
U
UN
N
C
CE
ER
RC
CL
LE
E
E
ET
T
S
SI
I
L
LA
A
N
NO
OR
RM
ME
E
D
DE
E
S
SA
A
V
VI
IT
TE
ES
SS
SE
E
E
ES
ST
T
C
CO
ON
NS
ST
TA
AN
NT
TE
E
.
.
Le vecteur vitesse, quand à lui, varie tout le temps.
Exemple : Lune autour de la Terre, les satellites géostationnaires, la Terre autour du Soleil.
2) Le repère de Frenet
- L’origine du repère de Frenet est
le point M, centre du satellite.
- Le vecteur T représente le vecteur
unitaire porté par la tangente. Il est
orienté dans le sens du mouvement.
- Le vecteur N représente le vecteur
unitaire porté par la normale. Il est
dirigé vers le centre de la planète.
- Le repère de Frenet est mobile.
3) Le vecteur accélération
v v T
= ⋅
0
dv dv dT v
a T v v N
dt dt dt r
= = ⋅ + ⋅ = + ⋅
→
2
v
a N
r
= ⋅
Au cours d’un mouvement circulaire uniforme, l’accélération est radiale (selon la normale),
centripète (dirigée vers le centre) et sa valeur dépend des carrés de la vitesse et de l’inverse du
rayon.
IV – Application aux satellites et planètes
1) Rappel : la force de gravitation universelle
Enoncé (Isaac Newton, 1667) : D
D
E
EU
UX
X
C
CO
OR
RP
PS
S
D
DO
ON
NT
T
L
LA
A
R
RE
EP
PA
AR
RT
TI
IT
TI
IO
ON
N
E
ES
ST
T
S
SP
PH
HE
ER
RI
IQ
QU
UE
EN
N
,
,
D
DE
E
M
MA
AS
SS
SE
ES
S
m
m
A
A
E
ET
T
m
m
B
B
,
,
S
SE
EP
PA
AR
RE
ES
S
D
D
’
’
U
UN
NE
E
D
DI
IS
ST
TA
AN
NC
CE
E
r
r,
,
S
SO
ON
NT
T
S
SO
OU
UM
MI
IS
S
A
AU
U
F
FO
OR
RC
CE
ES
S
D
DE
E
G
GR
RA
AV
VI
IT
TA
AT
TI
IO
ON
N
U
UN
NI
IV
VE
ER
RS
SE
EL
LL
LE
ES
S
D
DO
ON
NT
T
L
L
’
’
E
EX
XP
PR
RE
ES
SS
SI
IO
ON
N
E
ES
ST
T
:
:
2
A B
A B AB
m m
F G u
r
→
⋅
= − ⋅ ⋅
A B B A
F F
→ →
= −
T
N
M
r

Constante de gravitation universelle :
11 3 1 2
6,67259 10
G m kg s
− − −
= ⋅ ⋅ ⋅
2) Le vecteur accélération
Système : {un satellite de la Terre}
Référentiel : géocentrique
Forces extérieures : F
T/sat
2
ème
loi de Newton :
2 2
ext sat sat T sat sat sat
T sat T
sat sat sat
F m a F m a
G m m G m
u m a a u
r r
→
= ⋅ → = ⋅
⋅ ⋅ ⋅
− ⋅ = ⋅ → = − ⋅
∑
2T
sat
G m
a N
r
⋅
= ⋅
L’accélération est indépendante de la masse du satellite. Elle ne dépend que du rayon de
l’orbite.
Remarque :
En général :
2
dv v
a T N
dt r
= ⋅ + ⋅
Or :
2T
G m
a N
r
⋅
= ⋅
donc
0 0
dv dv
T
dt dt
⋅ = ⇒=
v constante
=
3) Le vecteur vitesse
2
2
( )
( )
T
v
a N Frenet
r
G m
a N Newton
r
= ⋅
⋅
= ⋅
22
2
T T
G m G m
vN N v
r r r
⋅ ⋅
⇒⋅ = ⋅ ⇒=
T
G m
v
r
⋅
=
r
B
A
AB
u
A B
F
→

La vitesse dépend du rayon de l’orbite. Plus le rayon est grand, plus la vitesse est petite.
T
T
G m
v
R z
⋅
=
+
R
T
: rayon de la Terre
6380
T
R km
= z : altitude du satellite
4) La période de révolution d’un satellite
L
L
A
A
P
PE
ER
RI
IO
OD
DE
E
D
DE
E
R
RE
EV
VO
OL
LU
UT
TI
IO
ON
N
D
D
’
’
U
UN
N
S
SA
AT
TE
EL
LL
LI
IT
TE
E
E
ES
ST
T
L
LA
A
D
DU
UR
RE
EE
E
Q
QU
UE
E
M
ME
ET
T
U
UN
N
S
SA
AT
TE
EL
LL
LI
IT
TE
E
P
PO
OU
UR
R
E
EF
FF
FE
EC
CT
TU
UE
ER
R
L
LE
E
T
TO
OU
UR
R
D
DE
E
S
SO
ON
N
A
AS
ST
TR
RE
E
A
AT
TT
TR
RA
AC
CT
TE
EU
UR
R
.
.
O
O
N
N
L
LA
A
N
NO
OT
TE
E
T
T.
.
2 2 2
T
r r r
v T T
T v
G m
r
π π π
=⇒=⇒=
⋅
3
2
T
r
T
G m
π
=
⋅
La période est indépendante de la masse et dépend de l’altitude.
Remarque : en mettant au carré :
2 2
3
4
T
T
r G m
π
=
⋅
: on retrouve la 3
ème
loi de Kepler
On peut déterminer la masse d’un corps attracteur connaissant la période et le rayon de
l’orbite d’un satellite.
5) Cas des satellites géostationnaires
Un satellite géostationnaire a une position fixe par rapport à la Terre. Par rapport au
référentiel géocentrique, il a un mouvement rectiligne uniforme.
Il se situe dans le plan de l’équateur et sa période de révolution est celle de la Terre
(23h56min).
2
32
4
T
T G m
r
π
⋅ ⋅
=
Plus l’orbite est grande, plus la période est grande, plus la vitesse est petite.
1
/
5
100%