Modélisation des liaisons: Degrés de liberté et liaisons mécaniques
Telechargé par
jcbochy

Modélisation des liaisons
BTS DRB
page 1
Modélisation des liaisons
1 - Degrés de liberté d’un solide
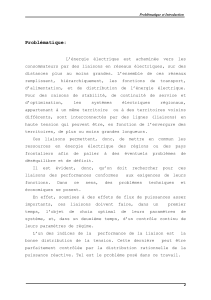
Un solide libre dans l’espace possède 6
degrés de liberté :
- 3 translations
- 3 rotations
Ces 6 degrés de liberté permettent au
solide d’occuper n’importe quelle position dans
l’espace
Si ce solide est une pièce d’un système mécanique (ex : aiguille d’une montre, roue d’une
voiture, contact mobile d’un disjoncteur…) le nombre de ses degrés de liberté sera limité
par les liaisons qu’il entretient avec les autres pièces du système.
2 - Les différents types de contact
On distingue de manière purement théorique trois grands types de contact :
le contact ponctuel ;
le contact linéique ;
le contact surfacique.
Le contact ponctuel : deux solides S1 et S2 sont en contact ponctuel si l’intersection de
leur représentation géométrique est un point (relation de contact).

Modélisation des liaisons
BTS DRB
page 2
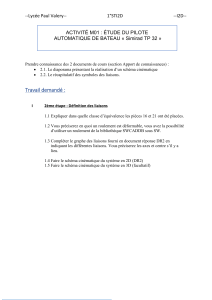
Le contact linéique : deux solides S1 et S2 sont en contact linéique si l’intersection de
leur représentation géométrique est une ligne (relation de contact).
Dans les cas les plus pratiques, on se limitera uniquement à deux types de lignes :
une droite (le contact est dit linéique rectiligne) ;
un cercle (le contact est dit linéique circulaire).
Le contact linéique rectiligne Le contact linéique circulaire
3 - Liaisons élémentaires de 2 solides
Les liaisons élémentaires sont les liaisons les plus courantes qui peuvent unir 2 pièces d’un
mécanisme.
On les représente à l’aide de schémas normalisés (voir tableau) qui permettent de
modéliser un mécanisme sous la forme d’un schéma cinématique (comme on modélise un
circuit électrique par un schéma électrique).
Ces liaisons sont définies par :
les degrés de liberté d’un solide par rapport à l’autre qu’elles autorisent
la nature de la surface de contact des 2 solides.
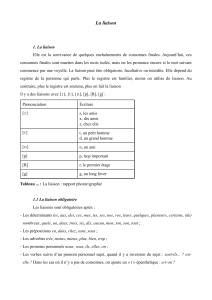
Pour que les mobilités de la liaison puissent être clairement définies, il faut les exprimer
dans un repère qui possède une orientation particulière par rapport à la liaison.
Tx, Rx, Ry et Rz
x
y
z
z
x
y
Tz, Rx, Ry et Rz

Modélisation des liaisons
BTS DRB
page 3

Modélisation des liaisons
BTS DRB
page 4

Modélisation des liaisons
BTS DRB
page 5
Une liaison élémentaire peut être obtenue par association d’autres liaisons élémentaires
Toute liaison élémentaire peut-être obtenue par association de liaisons ponctuelles.
 6
6
1
/
6
100%