Modélisation de trajectoires en virage et sécurité routière
Telechargé par
Mamadou Tahirou Diallo

See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/48270989
Modélisation de trajectoires de véhicules de véhicules en virage par analyse de
données expérimentales – application à la sécurité routière
Article · January 2011
Source: OAI
CITATIONS
2
READS
1,273
2 authors:
Daucher Dimitri
Université Gustave Eiffel
1 PUBLICATION2 CITATIONS
SEE PROFILE
Abdourahmane Koita
University of Paris-Est
21 PUBLICATIONS50 CITATIONS
SEE PROFILE
All content following this page was uploaded by Abdourahmane Koita on 16 October 2014.
The user has requested enhancement of the downloaded file.

19 ème
Congrès Français de Mécanique Marseille – Août 2009
Modélisation de trajectoires de véhicules en virage par analyse
de données expérimentales – Application à la sécurité routière
Dimitri DAUCHER1, Abdourahmane KOITA2
Laboratoire Central des Ponts et Chaussées (LCPC)
58, boulevard Lefebvre – 75732 Paris Cedex 15 – France
Résumé : Nous proposons une modélisation de trajectoires (loi horaire d’un vecteur position, vitesse,
accélération) de véhicules en virage à partir de données expérimentales pertinentes. Basée sur la
méthode des nuées dynamiques notre méthode discrimine d’abord plusieurs classes de trajectoires.
Puis elle associe un modèle à chaque classe par une méthode d’approximation de loi. Ce travail sera
complété par la mise en œuvre d’une méthode fiabiliste permettant d’associer un niveau de sécurité à
chaque classe.
Abstract : This paper presents a stochastic analysis of experimental trajectories in bend within a
suitable mathematical framework. One will make a classification of the experimental trajectories in order
to identify class. Then, we characterize a process governing each class. This work is a precondition to
the construction of an indicator of risk.
Mots-clés : Modélisation de trajectoires de véhicules en virage, analyse statistique, méthode des
nuées dynamiques, densité spectrale de puissance, densité de probabilité, processus stochastique,
développement de densités de probabilité sur des bases fonctionnelles
1.Introduction
Malgré une amélioration significative de la sécurité routière ces dernières années, on a encore, en
France en 2007, un bilan d’accidents de la route très insatisfaisant (4838 tués et plus de 100 000
blessés). Bien évidemment le bilan est encore plus lourd à l’échelle mondiale [1]. D’après une étude du
LAB une meilleure gestion des difficultés en virage pourrait permettre d’éviter environ 15% des
accidents de véhicules légers en France. Parvenir à appréhender la notion de risque routier en virage
est une question ouverte très importante. Plus précisément, il s’agit de proposer un cadre scientifique
adéquat permettant d’évaluer quantitativement des niveaux de risque pour un conducteur circulant à
bord d’un véhicule léger sur une portion d’une route donnée comportant un virage. C’est à cette difficile
question que ce papier va tenter d’apporter des premiers éléments de réponse.
Pour cela nous nous intéressons d’abord à la notion de trajectoire de véhicule en virage. Elle sera
présentée en détails au second paragraphe. Notons simplement pour le moment qu’il s’agit d’une
fonction continue de IR+ dans IRn qui à chaque instant associe dans un plan les coordonnées du centre
de gravité du véhicule, les 2 composantes de sa vitesse et les 2 composantes de son accélération. Ces
grandeurs constituent un indicateur des comportements effectifs des véhicules et de leur conducteur
dans leur contexte, donc de l’usage des infrastructures par les véhicules, permettant ensuite
d’appréhender les risques routiers. Les trajectoires de véhicules ne peuvent pas être vues uniquement
comme la résultante d’un modèle mécanique (de type dynamique du véhicule[10]). En effet, d’autres
facteurs interviennent dans leur réalisation (comportement du conducteur, problème de visibilité,
interactions avec la route, …). Ajoutons que pour être opérationnels ces modèles nécessitent de
connaître précisément les paramètres qui les gouvernent (masse du véhicule, hauteur du centre de
gravité, …). Ce nouveau point faible de ce type de modélisation peut s’avérer gênant (voir rédhibitoire)
si l’on a en tête des applications avancées en sécurité routière qui nécessitent de connaître ces
1

19 ème
Congrès Français de Mécanique Marseille – Août 2009
données en temps réel. C’est pourquoi nous proposons de construire des modèles mathématiques
pertinents et simples aptes à simuler correctement diverses catégories de trajectoires pratiquées par un
panel représentatif d’usagers sur un virage donné. Là est le principal objectif du travail présenté ici.
Pour le mener à bien nous sommes parti de la connaissance – sur un virage donné – d’une famille F de
trajectoires représentatives en situation de conduite naturelle ([2],[3]). Nous nous sommes limité ici aux
trajectoires réalisées par temps sec. Toutefois la démarche pourrait également s’appliquer à des
trajectoires en conditions météorologiques plus critiques. Les données utilisées ont été recueillies à
l’aide de dispositifs spécifiques (systèmes développés par le LCPC) d’une part et d’un protocole
expérimental d’autre part. Le paragraphe suivant aborde notamment ce point. Le paragraphe 3 traite
des questions de modélisation. Enfin, la dernière partie est consacrée aux perspectives en terme
d’évaluation du risque routier.
2.Trajectoires, dispositif de mesure et recueil de données
La trajectoire d’un véhicule durant un intervalle de temps T = [0,
τ
] est la résultante de l’interaction
entre ce véhicule, son conducteur et l’infrastructure routière. Elle peut être définie par la fonction
continue déterministe suivante :
(1) y(t),x(t),y(t),x(t)y(t),,x(t) (t) t
IR T :
6
=Φ
→Φ
••••••
Cette fonction associe à chaque instant t la position dans le plan du centre de gravité du véhicule ainsi
que ses dérivées premières (vitesse latérale et vitesse longitudinale) et secondes (accélérations
latérales et accélérations longitudinales).Il ne semble toutefois pas très judicieux de modéliser la notion
de trajectoire par une fonction déterministe. Un même conducteur circulant à bord d’un même véhicule
sur une même route dans les mêmes conditions (trafic, météo, état du conducteur, …) ne reproduira
pas exactement deux fois la même trajectoire au sens de (1). C’est pourquoi nous préférons modéliser
les trajectoires par un processus stochastique de la forme :
(2) )(t, y,x,y,xy,,x )(t, )(t,
IR x IR : U
6
ωωω
=Ψ
→Ω
••••••
Abordons maintenant le problème de la mesure des trajectoires de véhicule sous circulation, point de
départ de notre étude. L’opération de recherche Métrologie du Trafic et des Trajectoires (MTT) [2] du
LCPC a permis de développer et de mettre en œuvre différents outils de mesure de trajectoires locales
sur des zones réputées dangereuses. Parmi ceux-ci les dispositifs embarqués à bord de véhicules
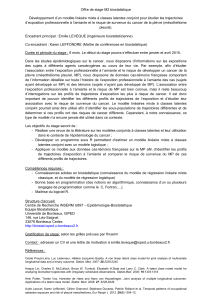
instrumentés sont les plus performants tant d’un point de vue qualitatif que quantitatif. Nous avons donc
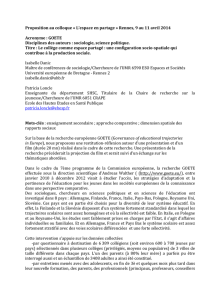
utilisé une Renault Clio (du LCPC) équipée d’un système informatique d’acquisition d’événements placé
dans le coffre, couplé à des capteurs précis des paramètres cinématiques (GPS centimétrique et
centrale inertielle) avec une fréquence d’acquisition de 100 Hz (figure 1). Pour des raisons de sécurité,
mais aussi pour assurer une bonne répétabilité des mesures avec ce véhicule lourdement instrumenté,
il a été décidé d’opérer sur un circuit fermé : une partie de la piste de glissance du centre de Nantes du
LCPC, constituée d’un virage similaire à ceux que l’on peut rencontrer sur routes nationales (figure 1).
L’objectif de l’expérimentation était d’observer sur ce virage et avec cette voiture, plusieurs centaines de
trajectoires se rapprochant le plus possible de celles qui seraient pratiquées par des usagers si ce
virage était situé sur une route ouverte. Pour cela nous avons fait appel à un panel de conducteurs
auquel ont été données des consignes à respecter (conduite apaisée, conduite rapide, respect de
règles de sécurité,...). Ce panel comprenait 23 personnes travaillant sur le site de Nantes du LCPC,
2

19 ème
Congrès Français de Mécanique Marseille – Août 2009
sélectionnées selon plusieurs critères :âge, sexe, nombre d’années écoulées depuis l’obtention du
permis de conduire, et goût personnel pour la conduite.
Figure 1 : système d’acquisition de trajectoires et vue aérienne du parcours choisi
Pour davantage d’informations au sujet du protocole expérimental ayant permis de recueillir les
données de notre étude, nous renvoyons le lecteur intéressé à [11].
Au final, sur le parcours choisi, nous avons obtenu 230 échantillons de trajectoires exploitables. Bien
entendu, les mesures recueillies sont des observations discrètes de réalisations de différents processus
stochastiques vectoriels de la forme de l’équation 2.
3.Analyse des observations et modélisation proposée
Avant d’aborder le problème de la modélisation, il est nécessaire de classer les trajectoires recueillies
en sous-ensembles homogènes. En effet, les trajectoires observées pour des conducteurs ou des
consignes différents sont des réalisations de processus stochastiques différents. Il n’est même pas sûr -
a priori - que l’on puisse rattacher à un même processus les trajectoires associées à un même couple
conducteur-consigne. Parmi les raisons à cela, on peut citer par exemple l’effet d’accoutumance.
Nous avons donc à classer 230 échantillons de trajectoires de la forme :
{ }
pc,
I k
pc,
k
pc,
k
pc,
k
pc,
k
pc,
k
pc,
k
p c,
y
x
y
x
y
x
,,,,,
∈
=
ε
où :
{ }
pc,pc,
N,...,2,1I
=
,
IN N
pc,
∈
c est un entier naturel qui désigne un numéro de conducteur
23c1
≤≤
p est un entier naturel qui désigne un numéro de trajectoire
10p1
≤≤
(A chaque conducteur est
associé 10 trajectoires)
y
x
pc,
k
pc,
k
et
sont les observations des coordonnées du centre de gravité du véhicule à l’instant
t
pc,
k
;
y
x
pc,
k
pc,
k
et
désignent les observations de la vitesse latérale et de la vitesse longitudinale du véhicule à
l’instant
t
pc,
k
; enfin
y
x
pc,
k
pc,
1k
et
+
désignent les observations de l’accélération latérale et de l’accélération
longitudinale du véhicule à l’instant
t
pc,
k
p ck 10
2
pc,
k
pc,
1k
tt
∀∀∀=−
−
+
et
p c 0
t
pc,
0
∀∀=
3

19 ème
Congrès Français de Mécanique Marseille – Août 2009
ε
p c,
est donc l’ensemble des observations discrètes relatives à la pème trajectoire réalisée par le cème
conducteur ayant participé à l’expérience. Le problème à résoudre est alors de trouver un entier naturel
K tel que l’on puisse répartir la famille
{ }
pc,
p c,
ε
en K sous-famille statistiquement similaires et interpréter
ces familles comme des réalisations discrètes de K processus stochastiques de lois différentes de la
forme :
(3) K 1,..., k )(t, U )(t,
IR IR : U
k
6
k
=
→Ω×
ωω
Nous avons résolu ce problème en utilisant la méthode des nuées dynamiques, dont nous nous
contentons de rappeler brièvement le principe général en 4 grandes étapes. Pour davantage
d’informations sur cette méthode on peut se reporter à ([4],[6]).
1re étape : On répartit la population en K classes contenant n1, n2, n3,….nk éléments, selon des critères
de tri fixés par l’utilisateur en fonction des propriétés de la population considérée. On considère le
noyau Nj j = 1,…,k, de chaque classe, défini comme l’élément moyen de la classe (calcul d’une
moyenne géométrique).
2ème étape : On calcule D(
ε
p c,
, Nj) pour tout élément
ε
p c,
et pour tout noyau Nj (où D désigne une
distance ; on pourra par exemple choisir la distance euclidienne).
3ème étape : On alloue chaque élément
ε
p c,
au noyau Nj le plus proche, tel que D(
ε
p c,
, Nj) est la plus
faible des distances à l’ensemble des noyaux.
La classe Cj est donc définie par :
( ) ( ){ }
jr ,, ;
,,,
≠∀≤=
rpcjpcpcj
NDNDC
εεε
4ème étape : On cherche les nouveaux noyaux des classes Cj définies à l’étape 3, puis on répète les
étapes 2,3 et 4 jusqu’à ce qu’un critère de convergence ([4], [5]) soit vérifié. La convergence ultime est
bien sûr obtenue lorsque la composition du noyau est invariante d’une itération à la suivante.
En pratique, après plusieurs essais de classification selon cette méthode, un choix de 4 classes s’est
révélé optimal par rapport au critère de convergence. Concrètement, une classe correspond à un profil
de vitesse moyen sur le parcours (parmi 4) et un profil de positionnement latéral sur la chaussée (parmi
2). Chaque classe identifiée est alors assimilable à un ensemble de réalisations discrètes d’un
processus stochastique de la forme (3). Pour la clarté de ce qui va suivre, nous considérons une classe
donnée et notons U le processus stochastique associé à cette classe, que nous cherchons à
caractériser. Par construction ce processus n’est pas stationnaire. La non stationnarité de U provient à
la fois de la non stationnarité de
(t)m t
U
et de
(t)L t
U
Nous effectuons une transformation de U pour se ramener au cas d’un processus stationnaire à l’ordre
2, ce qui est nécessaire car en dehors de ce cadre on est démuni d’outils mathématiques performants.
Pour cela nous calculons, à partir des échantillons expérimentaux disponibles, une estimation de la
variance matricielle du processus U :
(4) ](t))m - (U(t) (t))m - (U(t) IE[ (t)V t
(6,6)Mat IR : V
T
UUU
IRU
=
→
où
(t)m t
U
est la fonction qui à chaque instant t associe la moyenne temporelle
(t)m
U
du
processus U. Par construction
(t)V
U
est une matrice symétrique et définie positive pour tout réel t.
Elle admet donc, pour tout réel t une décomposition de Cholesky de la forme :
T
UUU
(t)L (t)L (t)V
=
4
 6
7
6
7
1
/
7
100%