Diagnostic à base de modèles à événéments discrets
Module Outils et Techniques de Diagnostic
Cours basé sur le polycopié de M. Combacau
Euriell Le Corronc et Pauline Ribot
M2 IDIM
Université Toulouse 3 - Paul Sabatier
2020-2021
E. Le Corronc, P. Ribot Diagnostic à base de modèles à événéments discrets 1 / 37


Systèmes à événements discrets
Pourquoi étudier les SED ?
Les systèmes sont de plus en plus complexes
Apparition d’ordinateurs et du traitement informatique (numérique)
Utiles lorsqu’on peut discrétiser un système quelconque (modélisation
qualitative)
Exemple
Réseaux de transport
Réseaux informatiques
Ordinateurs, calculateurs
Protocoles manufacturiers, . . .
E. Le Corronc, P. Ribot Diagnostic à base de modèles à événéments discrets 3 / 37

Systèmes à événements discrets
Caractéristiques des SED
Etat discret : abstraction d’états en classe discrète d’états
Dynamique événementielle : l’occurrence d’un événement peut
provoquer un changement d’état (asynchrone/synchrone)
M2 PEnTE - P. Ribot, E. Le Corronc
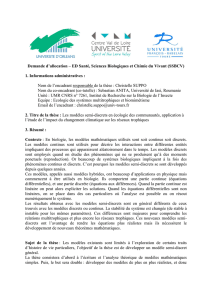
Caractéristiques des SED
Etat discret, dynamique événementielle (asynchrone)
10
2. Systèmes à événements discrets
x1
x5
x2
x4
x3
Etat discret
Temps
e1 e2 e3 e4 e5 e6
E. Le Corronc, P. Ribot Diagnostic à base de modèles à événéments discrets 4 / 37

Systèmes à événements discrets
Concept d’événement
Instantané, contrôlable (action) ou spontané (panne)
Exogène ou endogène
Observables ou non-observables
Evénements observables : alarmes, messages sur des bus, actions
observables, . . .
Evénements non-observables : événements internes, événements de
fautes, . . .
Exemples
Une personne presse un bouton
Une machine se réinitialise suite à un court-circuit
Le niveau maximal de liquide est atteint dans un réservoir
E. Le Corronc, P. Ribot Diagnostic à base de modèles à événéments discrets 5 / 37
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%