POTENTIEL ET CHAMP DE FORCES – OSCILLATEUR AMORTI
1
Champ et potentiels. Energie
M-1) Mise en orbite d’un satellite.
On notera g0 l’intensité du champ de pesanteur au niveau du sol, RT le rayon de la terre de centre O et la
vitesse angulaire de rotation de la terre autour de l’axe des pôles de période T0 = 24 H. La latitude d’un lieu
terrestre M est l’angle entre OM et le plan équatorial.
Un satellite de masse m est lancé initialement d’un point B du sol terrestre de latitude , pour être mis sur une
orbite circulaire de rayon r proche de RT (orbite rasante.)
a) Exprimer en fonction de g0, m, RT, et l’énergie mécanique initiale EB du satellite sur sa base
de lancement dans le référentiel géocentrique (référentiel lié au centre de la terre et dont les axes sont fixes).
b) Exprimer en fonction de m, g0, RT et r l’énergie mécanique Em du satellite sur une orbite
circulaire de rayon r. Que devient Em dans le cas d’une orbite circulaire rasante, c'est-à-dire de rayon r ≈ RT ?
c) Exprimer en fonction de m, g0, RT, , et , l’énergie de mise en orbite rasante Em qu’il faut
fournir au satellite au moment du lancement pour qu’il puisse ensuite décrire l’orbite rasante. Quel est l’intérêt
de choisir une base de lancement située au voisinage de l’équateur (exemple de la base de Kourou en Guyane.)
d) Calculer la vitesse de libération du satellite, c'est-à-dire sa vitesse limite lors du lancement au-
delà de laquelle il se retrouvera libéré de l’attraction terrestre (donc avec une énergie potentielle nulle.)
(Rép. : a) EB = -mg0RT +(mRT2cos2) b) m = -mg0RT2/2r ; c) Em = mg0RT/2 −(mRT2cos2) ) d) 11,2 km.s-1.)
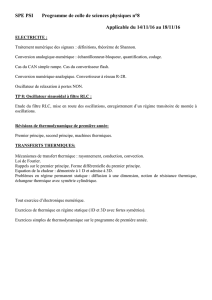
M-2) Potentiel et champ gravitationnels de la terre.
La terre est assimilée à un ellipsoïde de révolution autour de l’axe des
pôles Ox. Au point M de coordonnées polaires (r, ) on donne le potentiel
gravitationnel fonction des coordonnées r et :
Avec A = 1,08263 10-3, RT = 6378,164 km,
T
2
T
GM
R
= g0 = 9,7982 m.s-2.
1. A partir de l'expression du vecteur vitesse en coordonnées polaires établir l’expression du vecteur
déplacement élémentaire
dl
dans la base
) de ce même système de coordonnées.
2. Ecrire l'expression de la différentielle dVT de la fonction potentiel gravitationnel VT(r,) dans le système de
coordonnées r et . Quelle est la relation entre dVT et
G
.
3. Déduire alors les composantes Gr et G
du champ gravitationnel
G
au point M en coordonnées polaires.
En déduire les composantes de l'opérateur gradient en coordonnées polaires.
2.Calculer pour = 45°, l’angle entre
G
et
OM
en un point de la surface terrestre. Conclusion ?
(Rép. : 1. Gr=
( )
T22
0T
2
22
g R 3AR
1 1 3sin
r 2r
− + −
; G
=
4
0T
4
3Ag R sin 2
2r
−
= 1,62.10-3 rad.)
M
x
z

POTENTIEL ET CHAMP DE FORCES – OSCILLATEUR AMORTI
2
M-3) Mesure d’un coefficient de frottement solide.
Deux points matériels M et M', de masses m et m', sont reliés par un
fil inextensible (de masse négligeable) susceptible de glisser sur une
poulie fixe. Initialement le fil est tendu et le point M' repose sur un
support, à une hauteur h du sol .
À l'instant t = 0, un opérateur enlève le support et le point M se met à
glisser sur un plan horizontal avec un coefficient f de frottement solide.
1. Exprimer l’énergie mécanique du système global (M+M’). En
déduire la vitesse du système au moment où M’ touche le sol.
2. On note D la distance parcourue par M avant de s’immobiliser. Exprimer le coefficient de frottement f en
fonction de m, m’, h et D. (Rép. : 1. Em = ½(M+M’)v2 + M’gz (z altitude) ; 2. f=m’h/[mh+(m+m’)(D-h).)
Oscillateurs amortis en régime libre.
M-4) Pendule amorti.
Un pendule pesant est constitué par une boule d’acier de masse m, de masse volumique = 7800 kg.m-3 et de
rayon r = 0,005 m suspendue par un fil souple de longueur L = 1m. L’air, de viscosité = 0,001 (unité S.I.),
freine ce pendule avec la force
f 6 rv= −
où
v
est le vecteur vitesse de la boule. On pourra poser
= 6r/m. Il est abandonné initialement sans vitesse initiale avec une inclinaison par rapport à la verticale.
On observe des oscillations amorties d’amplitude suffisamment faible pour les assimiler à des petites
oscillations. On prendra g = 9,8 m.s-2.
1. Etablir l’expression de la forme générale de (t) angle du fil avec la verticale.
2. Définir et calculer le décrément logarithmique Calculer le facteur de qualité Q. Commenter la valeur.
On considère que le pendule cesse d’osciller lorsque l’amplitude des oscillations devient inférieure au
centième de sa valeur initiale. A l’aide de la notion de décrément logarithmique estimer le nombre
d’oscillations qu’il effectue .
4. Le pendule oscille maintenant dans un milieu de viscosité ’ > . Il
est soumis à la force de freinage
f 6 'rv= −
. Il est abandonné sans
vitesse initiale à l’instant t = 0 avec une inclinaison 0 avec la
verticale. On appelle trajectoire de phase de l'oscillateur la
représentation de
.
en fonction de donnée ci-contre. Commenter
l'allure du graphe.
Montrer qu'il est possible de trouver la valeur du décrément
logarithmique et du facteur de qualité Q à partir du graphe en
comparant 0 = OP0 et 2 = OP2. En déduire la valeur de ’.
(Rép. : 1. (t) = A.exp(-t/2)cos(
2
4g
l
2t
−
+) = 2,32.10-2 ; Q = 136 ; 3. 199 oscillations. ; 4. Q = 3,84 ; ’ = 0,0353 (S.I.).)

POTENTIEL ET CHAMP DE FORCES – OSCILLATEUR AMORTI
3
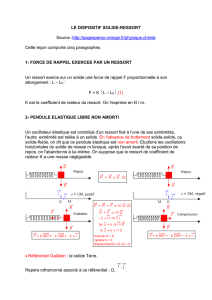
M-5) Un système oscillant est constitué d'une masse m mobile reliée à un support fixe par un ressort et un
amortisseur disposés en parallèle. La masse m, assimilée à un point matériel M, ne peut se déplacer que
verticalement. (fig.1)
La masse de l'ensemble (support, ressort, amortisseur) est négligeable devant m. Le ressort a une constante de
raideur k ; on note l0 sa longueur à vide et l sa longueur en charge. L'amortisseur exerce sur la masse m une
force de frottement fluide
z
f hzu=−
où h > 0 est le coefficient de frottement de l'amortisseur.
Le référentiel d'étude est le référentiel galiléen R attaché au repère (O, x, z).
1°) Déterminer l'ordonnée ze du point M à l'équilibre.
2°) La masse m est maintenant en mouvement. On pose z = ze + Z ; 02 = k/m ; h=2
km
Etablir l'équation différentielle vérifiée par Z (on exprimera les coefficients en fonction de et 0).
3°) On relève les variations de Z au cours du temps (voir figure 2). Exprimer la pseudopulsation en fonction
de et En supposant que 2 « 1, déterminer les valeurs numériques de k et de h sachant que m =10 kg.
(Rép : 1°) ze= l0+(mg/k) 2°)
0
2
0
Z 2 Z Z 0+ + =
; 3°) h=14,3 N.m-1s et k = 1588Nm-1)

POTENTIEL ET CHAMP DE FORCES – OSCILLATEUR AMORTI
4
Oscillations forcées.
Un sismographe est un appareil capable de mesurer l’amplitude d’une secousse sismique, indépendamment
de sa pulsation.
La masse m est liée au cadre rigide du sismographe par un ressort de raideur k et de longueur à vide l0 et par
un amortisseur de coefficient de frottement qui exerce sur la masse m une force opposé à sa vitesse relative
mesurée dans le référentiel lié au cadre du sismographe. Une pointe traçante liée à M reproduit les
déplacements verticaux de la masse m par rapport au cadre sur le papier.
La secousse transmet au support un mouvement oscillatoire zO’ = m.cost dans le référentiel terrestre. En
l’absence de secousses zO’ = 0.
1) Exprimer en fonction de m, g , k et l0 la longueur du ressort leq à l'équilibre (c.a.d. en l’absence de secousses).
On définit par la suite la variable Z , écart entre la longueur l du ressort à t et sa longueur à l’équilibre.
2) Montrer que la vitesse relative de M mesurée dans le référentiel lié au cadre s'identifie à .
3) Trouver l’équation différentielle que vérifie Z en présence de la secousse transmise au support.
4) Déterminez en régime sinusoïdal forcé l’expression de l’amplitude Zm de Z(t) en fonction de et des
constantes du problème.
5) Quelle valeur particulière de faut-il choisir pour que la pointe restitue ce mouvement quasi instantanément
après l'apparition de la secousse ? Justifier.
6) Montrer que l'équivalent électrique de ce sismographe est un circuit R, L, C série alimenté par une source de
tension sinusoïdale ue = Uem cost et utilisé aux bornes de L.
Retrouver l'équivalence électromécanique entre chaque paramètre.
(Rép. :
′
; 5) critique = 2 ; 6) m
.)
M-6) Principe du sismographe.
z
M
z
O’
O
O'
M(m)
k, l
0
1
/
4
100%