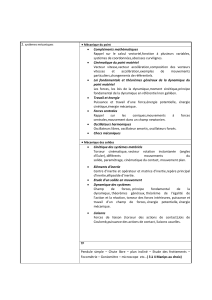
Cinématique : Mouvement du corps solide, angles d'Euler et champs de vitesse
Telechargé par
Omar Riahi

Cinématique
Mécanique du Solide Indéformable
28
CHAPITRE II : Cinématique
I) Définition d’un solide
Nous appellerons solide, un domaine d'un espace affine euclidien à trois
dimensions. Cette définition mathématique est pratiquement réalisée par des objets dont
la substance est assez dure pour que les déformations qu'ils subissent au cours de leur
utilisation soient négligeables. Il y a ainsi équivalence entre la notion de solide et celle
d'objet indéformable.
Les axes définis par le point Os et les vecteurs
sont liés au solide
Une particule du solide est située en un point de . Avec un point de et
trois vecteurs de base
fixes dans l'espace vectoriel associé à l'espace affine
, nous constituons un repère d'espace lié au solide
. Tout point du
solide a des coordonnées , et constantes dans ce repère. La position et l'orientation
du solide sont donc déterminées par celles du repère d'espace qui lui est lié.
II) La position et l’orientation
Nous utilisons un espace affine de référence muni d’un repère d’espace d’origine et
de base
. L’espace affine lié au solide étudié est mobile par rapport à :
son mouvement est celui de par rapport à .
(S)
OS
Ms
is
js
ks

Cinématique
Mécanique du Solide Indéformable
29
Pour situer dans il faut successivement :
placer le point de en un point de , c’est-à-dire choisir les coordonnées ,
, et de ce point dans le repère
;
orienter la base
par rapport à la base
dans l’espace vectoriel
commun aux espaces affines et , c’est-à-dire choisir les trois angles
d’Euler et qu’on va définir.
La connaissance des valeurs des trois paramètres de position , , et et des trois
paramètres d’orientations et qu’on détermine complètement la situation du
solide dans . On dit que le solide possède six degrés de liberté.
Remarques :
A l’espace affine qui définit les positions, il faut associer un espace affine à une
dimension dont les points sont les dates (où le temps). Ainsi la position d’un solide est
déterminée par les six paramètres :
, , , et
x
y
z
i
j
k
O

Cinématique
Mécanique du Solide Indéformable
30
Les angles d’Euler :
Ce sont les angles nécessaires pour orienter la base
par rapport à la base
dans l’espace vectoriel commun aux espaces affines et .
Trois rotations successives transforment la base
en la base
:
la rotation autour de
transforme
en une base
,
la rotation autour de
transforme
en
appelée base de Résal,
la rotation autour de
transforme
en
.
Ces trois angles sont les angles d’Euler :
est l’angle de précession,
est l’angle de nutation,
est l’angle de rotation propre.

Cinématique
Mécanique du Solide Indéformable
31
Représentation plane des rotations successives respectivement
autour de
,
et
j
v
u
i
Os
k
k
u
v
Os
w
ks
w
Os
ks
is
js
u

Cinématique
Mécanique du Solide Indéformable
32
Exemple : Angles d'Euler relatifs à une toupie
III) Le champ des vitesses d’un solide
De la définition du solide on déduit qu’un solide peut être vu comme un système de
points dont les distances mutuelles ne varient pas au cours du temps.
Soient et deux points quelconques d’un solide . Comme la norme du vecteur
est une constante au cours du mouvement, il vient relativement à
c'est à dire
Ainsi, les vitesses de deux points d’un solide satisfont à la propriété d’équiprojectivité
des champs de vecteurs antisymétriques
Cette propriété d’équiprojectivité entraîne l’existence d’un vecteur
tel que
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%