Chapitre 1
INTRODUCTION
Ce cours expose les méthodes générales de calcul des sollicitations et des dé-
placements des structures hyperstatiques. Il consacre également une large place
aux problèmes isostatiques jugés nécessaires à la bonne clarté de l'exposé. Les
méthodes particulières classiques sont également présentées afin de donner à
l'étudiant des moyens de calcul pratiques mais aussi rigoureux que possible. Ce
chapitre est consacré à des rappels.
1.1 CLASSIFICATION DES CORPS - NOTION DE POUTRE
Les corps qu'on rencontre et qu'on sera
amené à étudier peuvent être classer en
fonction de leurs dimensions. On distingue :
a) Les poutres (ou barres) :
Une dimension est beaucoup plus grande
que les deux autres qui sont de même ordre
de grandeur.
La poutre est l'élément le plus répandu
en construction. Les poutres sont associées,
entre elles ou à d'autres types d'éléments
pour constituer des systèmes ou structures.
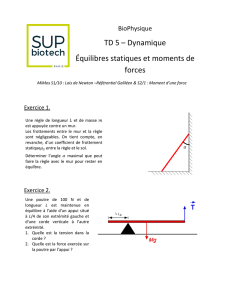
DEFINITION : une poutre est un solide engendré par une aire plane (
Σ
) dont le
centre de gravité décrit une courbe G
1
G
2
. Le plan P contenant
Σ
restant normal à
la courbe G
1
G
2
(Figure 1.1).
Section : l'aire
Σ
est appelée section droite, ou plus simplement section de la
poutre.
Fibre : le volume engendré par un élément d
Σ
de l'aire
Σ
est désigné par fibre de
la poutre.
Fibre moyenne : la courbe G
1
G
2
est appelée fibre moyenne ou axe moyen de la
poutre. C'est le lieu géométrique des centres de gravité des sections de la poutre.
Figure 1.1
P
G
1
G
2
Σ
d
Σ

2 CALCUL DES STRUCTURES HYPERSTATIQUES
Poutre gauche : c'est une poutre dont la fibre moyenne est une courbe gauche.
Poutre plane : il s'agit d'une poutre dont la fibre moyenne est une courbe plane
(c'est-à-dire contenue dans un plan).
Poutre droite : lorsque la fibre moyenne d'une poutre plane est un segment de
droite, on parle de poutre droite.
Poutre à plan moyen : c'est une poutre possédant un plan de symétrie qui con-
tient la fibre moyenne. Ce plan est désigné par plan moyen.
Les poutres à plan moyen chargées dans ce plan se rencontrent fréquemment
et constituent un des problèmes essentiels traités par la Résistance des Maté-
riaux.
Nous avons supposé la section
Σ
constante et dans ce cas la poutre est dite à
section constante ou poutre prismatique. Il arrive aussi qu'on soit amené, généra-
lement pour des raisons d'économie, à choisir des sections variables ; on parle
dans ce cas de poutre à section variable.
b) Les plaques, coques et membranes :
Il s'agit de corps dont deux dimensions, de même ordre de grandeur, sont
beaucoup plus grandes que la troisième (Figures 1.2a et 1.2b). Ces types d'élé-
ments ne sont pas traités ici.
c) Les poutres à parois minces ou poutres coques :
Les trois dimensions sont significatives et aucune n'est faible comparative-
ment aux autres (Figure 1.2c).
1.2 SYSTEMES ET CHARGES CONSIDERES
Les systèmes qui seront considérés dans ce cours seront constitués de poutres
isolées ou de poutres reliées les unes aux autres. Les poutres peuvent être assem-
blées de façon rigide (ex. portiques) ou de manière à permettre certaines possibi-
lités de déplacement - degrés de liberté - (ex. systèmes articulés).
Les poutres (ou plus exactement leurs axes moyens), les charges extérieures
et les réactions des appuis des systèmes étudiés dans ce cours seront générale-
ment situées dans un même plan. Dans ce cas, on dit qu'on a affaire à des sys-
tèmes plans.
Les charges qui sollicitent les systèmes comprennent :
- le poids propre (action de la pesanteur),
- les forces et les couples concentrés,
(a)
(b)
(c)
Figure 1.2

Introduction
3
- les forces et les couples répartis.
Il faut signaler qu'on entend par force concentrée une force répartie sur une
petite surface (ex. action d'une roue).
Par ailleurs, les charges sont supposées être appliquées lentement, de zéro à
leur valeur finale. On dit dans ce cas que les charges sont appliquées statique-
ment.
Enfin, nous supposerons que les charges extérieures sont directement appli-
quées aux fibres moyennes des poutres. Sous cette hypothèse, les poutres peu-
vent être représentées par leurs axes moyens.
1.3 APPUIS DES SYSTEMES PLANS
Les systèmes sont reliés à l'extérieur par des liaisons appelées appuis, et où
apparaissent des réactions qui réagissent à l'action des forces appliquées. Les
réactions et les charges exercées constituent un système de forces en équilibre,
car les constructions que nous considérons sont toujours en équilibre.
La classification des appuis se fait d'après le nombre de degrés de liberté
(ddl) (c'est-à-dire les possibilités de mouvement) qu'ils laissent au système et
d'après la nature des réactions qu'ils peuvent exercer sur lui.
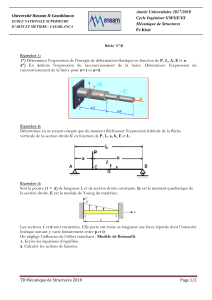
a) L'appui simple (Figure 1.3)
Il a deux degrés de liberté :
- la rotation autour de l'appui,
- la translation parallèlement au support de l'appui.
La réaction est connue par son point d'application (point de contact du sys-
tème avec l'appui) et par sa direction (elle est perpendiculaire au support). Seule
l'intensité reste à déterminer.
En résumé, l'appui simple se caractérise par : 2 degrés de liberté et 1 compo-
sante de réaction. La figure 1.3a montre le principe de fonctionnement de l'appui
simple. Les figures b, c et d indiquent les représentations courantes. La représen-
tation adoptée ici est celle de la figure d.
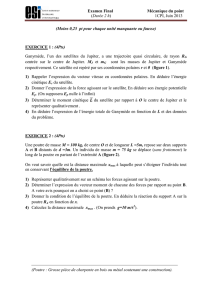
b) L'appui double (Figure 1.4)
Il a un seul degré de liberté, la rotation autour de l'appui. Toute translation
est par contre empêchée.
Dans ce cas, la réaction de l'appui est connue uniquement par son point d'ap-
plication, le point de contact du système avec l'appui (point A) (la ligne d'action
A
RA
→
(b) (c) (d)
(a)
Figure 1.3 : l'appui simple.

4 CALCUL DES STRUCTURES HYPERSTATIQUES
de la réaction passe par A). La réaction est décomposée suivant deux directions
perpendiculaires et les deux composantes sont à déterminer. L'appui double
présente donc 1 degré de liberté et 2 composantes de réaction.
c) L'encastrement (Figure 1.5)
Il n'a aucun degré de liberté. Tout dé-
placement est empêché. La réaction est un
vecteur pouvant occuper n'importe quelle
position du plan. On peut toutefois dé-
composer la réaction en 3 composantes :
- deux composantes suivant deux di-
rections perpendiculaires et passant
par A,
- un couple appliqué en A.
En définitive, l'encastrement se caractérise par : 0 degré de liberté et 3 com-
posantes de réaction.
d) Appui déformable - Appui élastique
Un appui qui peut subir un déplacement dans la direction d'une composante
de réaction est dit déformable (ex. sol compressible).
Si le déplacement est proportionnel à la composante de réaction qui l'a pro-
voqué, l'appui déformable est dit élastique.
1.4 PRINCIPE GENERAL D'ÉQUILIBRE - ÉQUATIONS D’ÉQUILIBRE
Les conditions nécessaires et suffisantes pour qu'un système soit en équilibre
sont :
a) les sommes des projections de toutes les forces sur 3 axes passant par un
point quelconque et non situés dans un même plan doivent être nulles,
b) les sommes des moments par rapport à chacun des trois axes doivent être
nulles.
Pour une construction (structure), la vérification de ces conditions signifie
qu'elle ne peut se déplacer comme un tout (corps rigide), autrement dit elle est en
équilibre.
RA
→
RA
→
A
Art. métallique Art. de Freyssinet Représentation adoptée
Figure 1.4 : l'appui double.
R
A
→
Représentation
Figure 1.5 : l'encastrement
C
A

Introduction
5
Soient oxyz un repère trirectangle et F
x
, F
y
et F
z
les projections sur les axes
ox, oy et oz d'une force quelconque. Les conditions d'équilibre (a) et (b) s'écri-
vent (cas général) :
Σ Σ
Σ Σ
Σ Σ
F M
F M
F M
x x
y y
z z
= =
= =
= =
0 0
0 0
0 0
/
/
/
(1.1)
Les équations (1.1) sont appelées équations d'équilibre de la statique ou six
équations universelles d'équilibre.
Dans le cas d'un système plan, xy par exemple, le système d'équations (1.1)
se réduit à :
Σ Σ Σ ∆
F F M
x y
= = =0 0 0 /
(1.2)
où
∆
est un axe quelconque perpendiculaire au plan xy.
Notons que les équations d'équilibre de la statique sont écrites en travaillant
sur la configuration initiale du système, c'est-à-dire non déformée ; autrement dit
les déformations sont négligées.
1.5 PRINCIPE DE LA COUPE - ÉLEMENTS DE RÉDUCTION
Considérons la poutre chargée représentée à la figure 1.6. Le corps étant en
équilibre sous l'action des charges extérieures et des réactions (supposées con-
nues), chaque partie de ce corps se trouve également en équilibre.
Pratiquons (par l'esprit) une coupe dans la poutre suivant le plan vertical yz,
de manière à avoir deux tronçons. Intéressons-nous par exemple à la partie de
gauche. Le tronçon considéré est en équilibre sous l'action des sollicitations qui
lui sont appliquées, des composantes de réaction de l'appui A et de l'action du
tronçon de droite supprimé.
L'action du tronçon de droite sur le tronçon de gauche peut être remplacée
par : une force résultante R (R
x
, R
y
et R
z
) et un couple résultant C (C
x
, C
y
et C
z
)
agissant au centre de gravité de la section Σ
ΣΣ
Σ. Les six composantes représentant
l'action de la partie de droite sur la partie de gauche peuvent être déterminées à
l'aide des équations de la statique exprimant l'équilibre de la partie considérée (3
équations d'équilibre de translation et 3 équations d'équilibre de rotation).
R F F F
C C C C
x x y y z z
x x y y z z
=
=
=
= = =
Σ
Σ
Σ
Σ Σ Σ
R R
C C/ / /
(1.3)
A
z
x
y
B
Σ
Figure 1.6
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
1
/
112
100%