Fonction de Transfert - Filtres Passifs : Cours d'Électronique
Telechargé par
Younes Zahi

ENSA – Kénitra
Cours d’Electronique d’instrumentation
Chapitre 1
Génie Mécatronique d’automobile– S5
Prof. : R. EL BOUAYADI
1
FONCTION DE TRANSFERT – FILTRES PASSIFS
I. DEFINITION
La fonction de transfert
( )
T j
ω
d’un quadripôle Q
1
, est définit par le rapport : ( )
Vs
T j
Ve
ω
=.
C’est une fonction complexe. Pour la représenter graphiquement, on utilise, entre autres, ce que l’on
appelle les diagrammes de Bode. Dans ce chapitre, nous décrivons cette représentation et nous
étudions quelques fonctions de transfert que nous utiliserons ensuite pour l’étude des filtres.
Fig.1.1 : schéma d’un quadripôle
II. DIAGRAMME DE BODE D'UNE FONCTION DE TRANSFERT
Nous allons voir que si l’on représente
( )
T j
ω
sur une échelle de fréquence linéaire, on obtient une
courbe ne présentant pas d’asymptote lorsque
f (avec
2
f
ω π
=
) tend vers les basses ou les hautes
fréquences. Le tracé de
( )
T j
ω
nécessite donc le calcul d’un grand nombre de points. Le tracé en
échelle linéaire est donc long et fastidieux. On verra également qu’il ne permet pas de dégager des
informations de façon rapide sur le système (fréquence de coupure, bande passante, ...), d’où
l’intérêt des diagrammes de Bode.
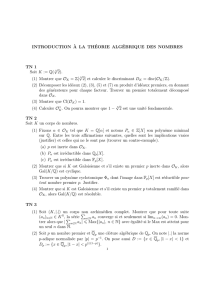
a. L’échelle logarithmique.
Dans ce système de graduation, le nombre étiqueté n est placé à une distance log(n) de l'origine , le
logarithme employé ici est le logarithme décimal.
•
La distance qui sépare 1 de 10 est la même que celle qui sépare 10 de 100 et celle qui sépare
0,1 de 1 car log(100) - log(10) = log(10) - log(1) = log(1) - log(0,1). Chacun de ces
intervalles s'appelle un module.
•
la distance qui sépare 1 de 2 est égale à celle qui sépare 10 de 20 mais est supérieure à celle
qui sépare 2 de 3 car log(2) - log(1) = log(20) - log(10) > log(3) - log(2).
Cela induit une sorte d'irrégularité récurrente dans les graduations.
1
Le quadripôle est un circuit relié à l’extérieur par quatre bornes (Fig.1.1) : 2 bornes d’entrée et 2 de sortie. Il est donc
caractérisé par 4 variables : la tension et le courant d’entrée, et la tension et le courant de sortie.

ENSA – Kénitra
Cours d’Electronique d’instrumentation
Chapitre 1
Génie Mécatronique d’automobile– S5
Prof. : R. EL BOUAYADI
2
Exemple d'échelle logarithmique à trois modules
L'échelle logarithmique est une alternative à l'échelle linéaire. Elle peut s'avérer préférable lorsqu'on
étudie un phénomène utilisant une gamme étendue de valeurs, l'échelle linéaire est mal adaptée. On
lui préfère une échelle logarithmique qui espace les valeurs faibles et rapproche les valeurs fortes.
b. Le diagramme de Bode
Le diagramme de Bode de la fonction de transfert est constitué de deux courbes tracées en fonction
de la fréquence f en échelle logarithmique. L’une relative à la norme et l’autre relative à la masse :
T
dB
(f) avec T
dB
= 20 Log
10
lT(f)l : appelé le gain en décibels (exprimé en dB).
Ф = Arg (T): argument de T est la phase (exprimé en radians ou en degrés). Il représente le
déphasage de la réponse par rapport à l’excitation.
Comme pour l’échelle logarithmique, l’utilisation de dB permet de simplifier la quantification de
valeurs pouvant s’étaler sur de très larges plages, c à d réduire l’écart entre des valeurs très éloignées
pour mieux les retenir et cela sans perdre de la précision.
Il est à noter que le dB indique le rapport (c à d, l’écart) entre ce qui entre et ce qui sort d’un circuit
(amplificateur par exemple). En effet, lorsqu’un amplificateur apporte un gain de 40 dB (c à d 100
en tension), cela veut dire que le signal de sortie est supérieur de 40 dB en amplitude par rapport au
signal d’entrée.
- exemple de l’utilisation de dB (les sons audibles par l’oreille)
Les puissances détectées par l’oreille s’étendent de P
min
= 10
-16
W/cm
2
à P
max
= 10
-3
W/cm
2
. Pour
simplifier la lecture, ces puissance sont traduits en intensités de sons audibles, définit par
0
10 log
P
I
P
= ⋅ , où
0 min
P P
=
. L’oreille est donc sensible aux sons qui s’étendent sur une gamme de
0 dB à 130 dB, ce qui est plus facile à manipuler et à retenir que les premiers chiffres en W/cm
2
.
Il est à noter que dans la définition de l’intensité des puissances en dB, on a utilisé un facteur de 10
avant le logarithme au lieu d’un facteur de 20. En fait, à l’origine, le dB est définit à partir de cette
dernière formule, où le Bel correspond à l’échelle logarithmique et le dB vient du fait qu’on a un
facteur de 10 avant le log (Bel = 10 dB). Le facteur de 20 dans la première définition dans le cas de
rapport des tensions vient du fait que la puissance est proportionnelle au carrée de la tension :
2
P V
α
= ⋅
et
(
)
2
10 log 10 log 20 log 10 log
P V V
α α
⋅ = ⋅ ⋅ = ⋅ + ⋅

ENSA – Kénitra
Cours d’Electronique d’instrumentation
Chapitre 1
Génie Mécatronique d’automobile– S5
Prof. : R. EL BOUAYADI
3
20 log 20 log
S S
dB
e e
V V
T K
V V
= ⋅ + = ⋅ (on prend K = 0, elle représente le déphasage entre le courant et
la tension).
N.B. Pour la suite, on utilisera Log pour signifier le logarithme en base 10.
Dans certains cas, le diagramme de Bode pourra être représenté en fonction d'une variable réduite
o
f
x
f
=
, où f
o
est définie à partir des éléments du circuit.
Il peut arriver que l'on se contente de simplifier l'étude du diagramme de Bode, et que l'on détermine
les asymptotes de la fonction T
dB
(f) et de l’argument de T (f).
Le diagramme obtenu est appelé diagramme asymptotique de Bode. Il rend compte rapidement du
comportement de la fonction de transfert.
III. ETUDE DE QUELQUES FONCTIONS DE TRANSFERT ELEMENTAIRES :
Nous étudierons les quatre fonctions de transfert suivantes :
0
f
T j
f
= ,
0
1
f
T j
f
= + ,
0
1
T
f
j
f
= et
0
1
1
T
f
j
f
=+
III.1. La fonction :
0
f
T j
f
=
• Etude du gain T
dB
(f) :
dB
0
20 log 20 log
f
T T
f
= ⋅ = ⋅ est tel que :
T
dB
(f) < 0 lorsque f < f
o
et T
dB
(f) > 0 lorsque f > f
o.
La fonction T
dB
= f (f) est
donc une droite oblique qui passe par f
o
(fig.1.2).
• Etude de la pente de la droite T
dB
= f (f) :
Considérons les fréquences f
a
et 10 fois la valeur de f
a
associées aux gains correspondants :
( )
0
20 log
aa
dB dB a
f
T T f
f
= = ⋅
et
( )
'
0
10
10 20 log
aa
dB dB a
f
T T f
f
= = ⋅
.
La variation du gain est donc de 20 dB si la variation de la fréquence est multipliée par dix. La pente
est donc de 20 dB par décade.
On montre aussi que pour des fréquences
f
b
et 2 f
b
, la variation de gain est de 6 dB, la pente est donc
de 6 dB par octave.

ENSA – Kénitra
Cours d’Electronique d’instrumentation
Chapitre 1
Génie Mécatronique d’automobile– S5
Prof. : R. EL BOUAYADI
4
N.B. Une octave et une décade correspondent respectivement à une multiplication par un facteur 2 et 10
de la fréquence
L’échelle logarithmique des fréquences ne peut pas démarrer du point 0 (fréquence nulle) du fait que
(
)
log 0
= −∞
.
•
Etude de
Ф
,
l’argument de T :
(
)
cos sin
j
T T e T j
Φ
= = Φ+ Φ
Re ( )
cos 0
T
T
Φ = =
et
Im ( )
sin 1
T
T
Φ = =
, donc
2
π
Φ =
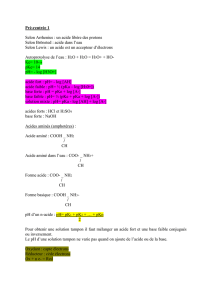
Ce qui implique les diagrammes suivants :
Fig.1.2 : Diagrammes asymptotiques de Bode de la fonction
0
f
T j
f
=
III.2. La fonction :
0
1
f
T j
f
= +
f << f
o
alors T ~ 1 (T
dB
~ 0) et Arg (T) = 0. L’asymptote basses fréquences (BF) est donc une
droite horizontale.
f >> f
o
alors T ~ j
o
f
f
. Nous pouvons utiliser les résultats précédents ; la pente de T
dB
, dans sa
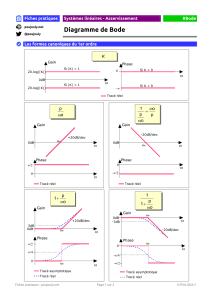
partie non nulle, reste égale à 20 dB par décade. Finalement, on obtient les courbes suivantes :

ENSA – Kénitra
Cours d’Electronique d’instrumentation
Chapitre 1
Génie Mécatronique d’automobile– S5
Prof. : R. EL BOUAYADI
5
Fig.1.3 : Diagrammes asymptotiques de Bode de la fonction
0
1
f
T j
f
= +
III.3. La fonction :
0
1
T
f
j
f
=
dB
0
0
1
20 log 20 log
f
Tf
f
jf
= ⋅ = − ⋅
et
( )
0 0
Arg Arg1-Arg Arg
f f
T j j
f f
= = −
. Nous pouvons
également utiliser les résultats précédents :
T
dB
> 0 pour f < f
o
et T
dB
< 0 pour f > f
o
.
(
)
Arg T
= Φ
soit
2
π
Φ = −
La pente de la courbe de gain est de - 20 dB / décade (ou bien de -6 dB / octave). On obtient donc
les courbes suivantes :
 6
7
8
9
6
7
8
9
1
/
9
100%