Chapitre I : Modélisation des systèmes linéaires
~ 1 ~
Introduction
Les systèmes industriels ceux sont des systèmes complexes, il est plus facile de le
décomposer en sous-systèmes, afin de le modélisé, par un modèle de comportement ou un
modèle de connaissance.
Ce modèle permet de :
• Comprendre et analyser le dispositif.
• Pouvoir prédire son comportement.
• Utiliser des outils de simulation
Dans ce chapitre, on s’intéresse à la d´détermination de modèles mathématique pour des
systèmes linéaires stationnaires (on parle aussi de systèmes linéaire à temps invariant,
notes LTI en anglais). Les modèles peuvent être abordés sous trois formes à peu près
équivalentes :
l’équation différentielle
la fonction de transfert
le modèle d’état.
Modélisation (Représentation) des systèmes
Pour réaliser une commande automatique d’un système, il est nécessaire d'établir des
schémas représentant ce système et les relations existant entre les entrées (variables de
commande) et les sorties (variables de sortie). L'ensemble de ces relations s'appelle
"modèle mathématique" du système. On distingue différents schémas et différents
modèles.
I. Représentation par schéma physique
Ce type de schéma utilise la normalisation de la technologie du système à étudier (schéma
électrique, mécanique, électronique,...).
Exemple 1 : Schéma électrique - circuit RC Le circuit (Fig.1) se compose d’une résistance
R et d’un condensateur C en série.
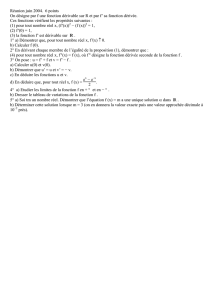
Exemple 2 : Schéma mécanique - masse ressort amortisseur Fig.2. Le système se compose
d'un ressort, d'une masse M et d'un amortisseur en série.
K
x(t)
M
α
F
Fig.1
Fig.2

Chapitre I : Modélisation des systèmes linéaires
~ 2 ~
Ce type de représentation ne convient pas toujours pour représenter les systèmes étudiés
qui sont de nature différente (thermique, hydraulique…) pour lesquels, il n’existe pas
forcément une représentation physique normalisée.
II. Représentations temporelles
1. Représentation par une équation différentielle
Un système dynamique linéaire peut être représenté par une équation différentielle à
coefficients constants liant les grandeurs d’entrée et de sortie. Soit un système linéaire et
scalaire. Le comportement d'un tel système est régi par une équation différentielle, ayant
pour forme:
Ou ;
Les coefficients et sont des constantes réelles, telles que,, et soient non
nuls.
n et m sont des entiers positifs tels que m≤ n pour que le système soit causal; n est
l’ordre du système.
c est un entier positif ou nul appelé classe du système.
Cette équation différentielle est une représentation entrée/sortie du système. La
solution de cette équation représente l’évolution de la sortie du système y(t) au cours
du temps en fonction de l’entrée u(t) et de conditions initiales.
Exemple 1 :
Considérons le système décrit par la figure 2 dont on veut définir la relation liant le
déplacement linéaire x(t) (sortie) et la force F(t) (entrée).
On se basant sur la méthode de Lagrange on trouve :
Energie cinétique du système :
avec
donc
Energie potentielle du système : avec donc
Energie de dissipation du système :
Lagrange du système :
L’équation différentielle du mouvement :
Comme le système c’est un système vibratoire amorti forcé, l’équation de Lagrange
s’écrite comme suite :
Équation différentielle du mouvement
Exemple 2 :
On étudie le circuit RLC (Fig 1) soumis à une tension u(t), on s’intéresse à la tension aux
bornes du condensateur et à l’intensité qui parcourt le circuit. La bobine est idéale.
On veut déterminer la relation liant u(t) (tension d’alimentation) et y(t) (le courant i(t)).
L’équation de maille donne :
La tension à la borne de la résistance :
La tension à la borne de l’inductance :

Chapitre I : Modélisation des systèmes linéaires
~ 3 ~
La tension à la borne du condensateur :
On applique la loi des mailles :
On se pose que :
L’équation devient:
2. Représentation par le modèle d’état
De manière alternative, le comportement d’un système linéaire invariant d’entrée u(t) et
de sortie y(t) peut être décrit par un nombre fini de grandeurs appelées variables d’états.
Ces variables permettent de déterminer les évolutions futures du système à partir des états
initiaux et de l’entrée.
Un modèle d’état est un ensemble fini d’équations différentielles du premier ordre reliant
des grandeurs scalaires, divisées en variables internes (variables d’états) et en variables
externes comprenant les signaux d’entrée et de sortie. La forme générale d’un tel modèle
est la suivante :
Où :
: représente la matrice d’état ou d’évolution
: représente la matrice d’entrée
: représente la matrice de sortie ou d’observation
: représente la transmission directe de l’entrée sur la sortie
L’état et la sortie peuvent ainsi être calculés, à tout instant, pour des conditions initial
x(0) quelconques.
Il est important de noter que, contrairement à la représentation par équation
différentielle, la représentation d’état d’un système n’est pas unique et dépend du choix
des variables d’état que nous opérons. On adopte fréquemment le schéma-bloc donné par
la Figure 3 pour illustrer cette représentation.
Figure 1.3 : Schéma-bloc d’une représentation d’état
Exemple 1 :
Dans le cas du système mécanique de l'exemple 2, l’entrée du système est sa force F(t)
alors que sa sortie est représentée par le déplacement linéaire y(t). On peut toujours
choisir comme variables d’état, dans ce cas (aucune dérivée en n’intervient):
B
A
C
D
∫
+
+
+
+
Équation d’état
Équation de sortie

Chapitre I : Modélisation des systèmes linéaires
~ 4 ~
L’équation différentielle de ce système c’est une équation différentielle linéaire du 2ème
ordre (deuxième dérivée).
Pour représenter ce système ce forme d’une représentation d’état
(Équation différentielle linéaire 1er ordre) il faut diminuer l’ordre de l’équation
différentielle du 2ème ordre au 1er ordre. Pour cela, on utilise le changement de variable
suivant :
D’où (1)
Selon ce changement de variable l’équation différentielle devient :
(2)
: Equation d’état
La sortie de ce système () est clairement le déplacement de la masse M c'est-
à-dire
D’après le changement de variable, le déplacement est égale à ( ).
Considérons et
, L'équation de sortie s'écrit alors :
La représentation par le modèle d’état du système s'écrit donc :
3. Représentation par fonction de transfert
Soit un système linéaire invariant d’entrée u(t) et de sortie y(t). On appelle fonction de
transfert du système le rapport des transformées de Laplace de la sortie et de l’entrée, à
conditions initiales nulles :
Avec :
: Représente la fonction de transfert du système
: Représente la sortie du système
: Représente l’entrée du système
Le dénominateur de la fonction de transfert est dit le polynôme du système
L’ordre du système est le degré de ce polynôme.
Équation d’état
Équation de sortie
U(P)
Y(P)
T(P)
Diagramme fonctionnel

Chapitre I : Modélisation des systèmes linéaires
~ 5 ~
Transformée de Laplace directe:
Elle consiste à étudier le comportement des systèmes (caractérisé dans notre monde réel
par des fonctions du temps) dans un monde symbolique où la variable n'est plus le
temps mais une variable symbolique.
Les intérêts de cette transformation sont:
Une simplification très importante des solutions mathématiques recherchées
Une généralisation facile de certains résultats
A toute fonction dans notre monde réel correspondra une fonction dans le
monde symbolique. Cette fonction sera appelée: image de. Inversement sera
appelée: originale de. Ce passage du monde réel au monde symbolique est défini par
la transformée de Laplace suivante:
Quelques propriétés des transformées de Laplace
1. Somme de deux fonctions
transformables
et alors :
2. Linéarité :
Si alors
3. Dérivée
Si et
4. Dérivée multiple
5. Théorème des valeurs initiales et finales
Théorème des valeurs initiales :
Théorème des valeurs finales :
o Exemple 1
Échelon unité de Heaviside:
Figure 4 : échelon
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%