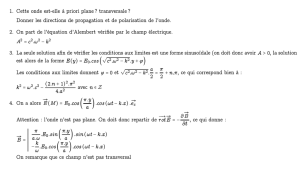
Cours d'électromagnétisme ECAM 3 : Ondes, Maxwell, Propagation
Telechargé par
driou.faure

Electromagnétisme
2019-2020
ECAM 3 étudiant
Auteur :
Olivier BECHU
Département :
Informatique et Télécommunications

Electromagnétisme
2
SOMMAIRE
Introduction : Rappels sur les champs électriques et magnétiques ________________ 4
1. Rappels d’électrostatique (champ électrique) __________________________________ 4
1.1. Champ électrique créé par une charge ponctuelle ______________________________ 4
1.2. Champ électrique créé par une distribution de charge ___________________________ 5
2. Rappels de magnétostatique (champ magnétique) ______________________________ 6
2.1. Source de champ magnétique ______________________________________________ 7
2.2. Les forces électromagnétiques _____________________________________________ 9
Chapitre 1 : Les ondes électromagnétiques et acoustiques ______________________ 14
1.1
Qu'est-ce qu'une onde électromagnétique ? __________________________________ 14
1.2.
Analogies et différences avec les ondes acoustiques ___________________________ 17
Chapitre 2 : Caractéristiques des milieux de propagation ______________________ 18
2.1.
Linéarité _____________________________________________________________ 18
2.2.
Perméabilité et permittivité _______________________________________________ 18
2.3.
Isotropie _____________________________________________________________ 18
2.4.
Homogénéité __________________________________________________________ 18
2.5.
Milieu LHI ___________________________________________________________ 19
2.6.
Plan du cours __________________________________________________________ 19
Chapitre 3 : Equations de Maxwell dans le vide ______________________________ 20
3.1.
Passage de la forme locale à la forme intégrale _______________________________ 21
3.2.
Contenu physique des équations de Maxwell _________________________________ 23
3.3.
Origine de la densité de courant de déplacement ______________________________ 24
3.4.
Conservation de la charge ________________________________________________ 24
3.5.
Conditions aux limites __________________________________________________ 25
3.6.
Les potentiels _________________________________________________________ 25
3.7.
Choix d'une jauge ______________________________________________________ 27
3.8.
Les potentiels retardés __________________________________________________ 29
Chapitre 4 : Propagation du champ électromagnétique dans le vide _____________ 30
4.1.
Equation de propagation dans le vide _______________________________________ 30
4.2.
Solutions de l'équation d'onde ____________________________________________ 31
4.3.
Onde progressive et onde stationnaire ______________________________________ 33
4.4.
Structure de l'onde plane progressive _______________________________________ 34
4.5.
Représentations des ondes planes progressives monochromatiques _______________ 36
4.6.
Polarisation des ondes planes sinusoïdales ___________________________________ 38
4.7.
Vitesse de phase _______________________________________________________ 41
4.8.
Vitesse de groupe ______________________________________________________ 41
Chapitre 5 : Energie électromagnétique Vecteur de Poynting ___________________ 42
5.1.
Energie du champ électromagnétique _______________________________________ 42
5.2.
Cas de l'onde plane progressive ___________________________________________ 45
Chapitre 6 : Indications sur l'électromagnétisme des milieux matériels ___________ 47
6.1.
Distinction entre charges libres et charges liées _______________________________ 47
6.2.
Conducteurs et diélectriques ______________________________________________ 47
Chapitre 7 : Milieux diélectriques - Polarisation ______________________________ 48
7.1.
Moment dipolaire et polarisation __________________________________________ 48
7.2.
Polarisation et distribution de charges équivalente ____________________________ 48

Electromagnétisme
3
7.3.
Exemple de calcul de
p
E
r
créé par
P
r
connue ________________________________ 49
7.4.
Champ dépolarisant ____________________________________________________ 50
7.5.
Equations de Maxwell - Vecteur
D
r
________________________________________ 51
7.6.
Susceptibilité __________________________________________________________ 51
7.7.
Autre écriture des équations de Maxwell ____________________________________ 52
7.8.
Aspect dynamique _____________________________________________________ 53
Chapitre 8 : Milieux magnétiques - Aimantation _____________________________ 54
8.1.
Moment magnétique et aimantation ________________________________________ 54
8.2.
Aimantation et distribution de courants équivalente ___________________________ 55
8.3.
Exemple de calcul de
m
B
r
créé par
M
r
connue ________________________________ 55
8.4.
Equations de Maxwell - Vecteur
H
r
________________________________________ 57
8.5.
Susceptibilité __________________________________________________________ 58
8.6.
Autre écriture des équations de Maxwell ____________________________________ 59
8.7.
Aspect dynamique _____________________________________________________ 59
Chapitre 9 : Equations de Maxwell dans les milieux matériels __________________ 60
9.1.
Equations de Maxwell dans un milieu matériel _______________________________ 60
9.2.
Cas des milieux LHI ____________________________________________________ 61
9.3.
Conditions aux limites __________________________________________________ 61
Chapitre 10 : Ondes planes dans un diélectrique non magnétique _______________ 62
10.1.
Equations de Maxwell __________________________________________________ 62
10.2.
Equation de propagation _________________________________________________ 62
10.3.
Relation de dispersion dans le cas de l'onde plane _____________________________ 63
10.4.
Cas d'une onde plane dans un milieu diélectrique non absorbant _________________ 63
10.5.
Cas d'une onde plane dans un milieu diélectrique absorbant _____________________ 65
10.6.
Impédance du milieu ____________________________________________________ 68
Chapitre 11 : Propagation dans un milieu bon conducteur _____________________ 69
11.1.
Equations de Maxwell - densité de courants de déplacement ____________________ 69
11.2.
Equation de propagation _________________________________________________ 70
11.3.
Relation de dispersion dans le cas de l'onde plane - Expression des champs_________ 70
11.4.
Energie ______________________________________________________________ 72
11.5.
Applications des effets de propagation dans les conducteurs _____________________ 73
Chapitre 12 : Réflexion et réfraction des ondes électromagnétiques ______________ 75
13.1.
Cas de deux diélectriques LHI non magnétiques et non absorbants _______________ 75
13.2.
Réflexion et réfraction à la surface d'un bon conducteur ________________________ 86
13.3.
Réflexion à la surface d'un conducteur parfait – les guides d'ondes _______________ 88
Chapitre 13 : Rayonnement des antennes ___________________________________ 99
14.1.
Rappels sur les potentiels retardés _________________________________________ 99
14.2.
Rayonnement lointain du dipôle oscillant __________________________________ 100
14.3.
Rayonnement d'une antenne demi-onde ____________________________________ 106
Systèmes de coordonnées ________________________________________________ 107
Formulaire d'analyse vectorielle __________________________________________ 109
Définition de l’angle solide _______________________________________________ 115

Electromagnétisme
4
Introduction :
Rappels sur les champs électriques et magnétiques
Celui qui ne sait rien en sait toujours autant que celui qui n’en sait pas plus que lui. Et réciproquement.
Pierre Dac
1. Rappels d’électrostatique (champ électrique)
1.1. Champ électrique créé par une charge ponctuelle
Une particule au point O et de charge électrique q (en Coulomb) créé un champ électrique radial au
point M :
Le champ électrique créé par q est :
Radial (direction),
Dirigé vers l’extérieur si q > 0 et vers l’intérieur si q<0 (sens)
D’amplitude
)/ : unité(
²4
1
)(
0
mV
r
q
rE
πε
=(norme)
Constante diélectrique
10
36
1
9
0
−
=
π
ε
(unité : F / m)
La force électrostatique créée sur une particule test q
0
s’écrit :
EqF
r
r
0
=
Et permet de définir que :
•
2 charges de même signe se repoussent,
•
2 charges de signe opposé s’attirent
Champ électrique entre 2 charges de signe opposé
rU
²4
1
0
r
r
r
q
E
πε
=
q > 0
M
E
r
rU
r
q < 0
M
E
r
rU
r

Electromagnétisme
5
1.2. Champ électrique créé par une distribution de charge
1.2.1. Théorème de superposition
Le champ électrostatique créé en un point par un ensemble de charges est la somme vectorielle des
champs électrostatiques créés en ce point par les différentes charges.
1.2.2. Cas d'un ensemble de charges ponctuelles qi
Les charges q
i
sont respectivement localisées aux points Pi et génèrent un champ électrique
i
E
r
.
Le champ électrique total peut être déterminé par la sommation vectorielle des champs
élémentaires :
==
ii
ii
i
i
r
uq
EME
2
0
4
1
)(
r
r
r
πε
où
→
→
=
MP
MP
u
i
i
i
r
et
→
=MPr
ii
1.2.3. Cas d'une répartition continue de charge
Répartition volumique de charge
ρ
: densité volumique de charge (en C/m
3
)
La charge portée par un élément de volume d
τ
s’écrit : dq =
ρ
.d
τ
Le champ électrique total peut être déterminé par :
τ
ρ
πε
d
Pr
Pu
ME
V
)(
)(.
4
1
)(
2
0
r
r
=
où
→
→
=
PM
PM
Pu )(
r et
→
=PMPr )(
Répartition surfacique de charge
σ : densité surfacique de charge (en C/m
2
)
La charge portée par un élément de surface dS s’écrit : dq =σ.dS
Le champ électrique total peut être déterminé par :
M
P
1
P
2
1
1
E
r
2
E
r
E
r
P
M
P
d
τ
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
1
/
115
100%