Réponse temporelle des systèmes dynamiques LTI - Cours d'automatique
Telechargé par
MulyricsIC 11

1
Automatique
Réponse temporelle des systèmes
dynamiques continus LTI
UV Automatique
ASI 3
Cours 2

2
Automatique
Contenu
!
Introduction
!
Etude des systèmes du premier ordre
"
Intégrateur
"
Système du 1
er
ordre
!
Etude des systèmes du 2
ème
ordre
"
Système du 2
ème
ordre avec réponse apériodique
"
Système du 2
ème
ordre avec réponse oscillatoire
!
Systèmes d'ordre supérieur à 2 et autre système
"
Notion de pôles dominants
"
Système avec retard

3
Automatique
Introduction
!
Système continu LTI
!
Décomposition en éléments simples
u(t)
H(s)
y
(t)
H(s): fonction de transfert
Quelle est la forme de la sortie y(t)du modèle en réponse
aux signaux usuels :
#impulsion de Dirac u(t)=
δ
(t)
#signal échelon u(t)=Γ(t)
#signal rampe u(t)=v(t)
∑
=
ii
s
H
s
H
)()(
H
i
(s): fonction de transfert de systèmes de
base ou systèmes fondamentaux (1
er
ordre,
2
e
ordre)

4
Automatique
Intégrateur (1)
!
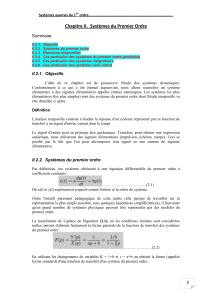
Système régi par l'équation différentielle
!
Fonction de transfert
!
Exemple
∫
== t
cdi
C
tVty 0)(
1
)()(
ττ
)()( tuty
T
i
=
&
∫
=
t
i
du
T
ty
0
)(
1
)(
ττ
⇒(CI nulle)
sT
sH
i
1
)( =
T
i
: constante d'intégration
Pôle :
λ
=0
R
u(t)
i(t)
C
V
c
(t)
Relation entre le courant i(t) et V
c
(t)
u(t)
y
(t)
∫
i
T
1

5
Automatique
Intégrateur (2)
!
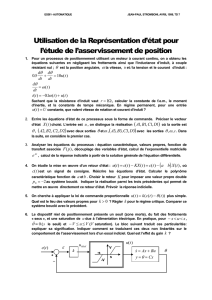
Réponse aux signaux usuels
"
Réponse impulsionnelle
"
Réponse indicielle
"
Réponse à une rampe
i
Tt
th )(
)(
Γ
=
La réponse impulsionnelle d'un intégrateur est un échelon
d'amplitude 1/T
i
)()( ttu
δ
=
⇒
()
tv
T
ty
i
1
)( =
)()( ttu
Γ
=
⇒
La réponse indicielle d'un intégrateur est une rampe de
pente 1/T
i
?)( =ty)()( tvtu =
⇒
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
/
32
100%