Unité : ST4-CHF
Année : 2002 - 2003
Auteur : C. Ripoll
LES OSCILLATEURS HYPERFREQUENCES

Groupe ESIEE - Département Signaux et Télécommunications
SOMMAIRE
Chapitre 1
Introduction à la génération de fréquence
1. GENERALITES........................................................................................................................................... 1
2. INTRODUCTION........................................................................................................................................ 1
3. CONDITIONS GENERALES D'OSCILLATION EN REGIME ETABLI ........................................... 2
3.1. EXEMPLES .............................................................................................................................................. 3
3.1.1. Application à un 1-port (dipôle).................................................................................................... 3
3.1.2. Application à un multiport actif 2-port (quadripôle) .................................................................... 3
3.1.3. Application à un multiport actif 3-port (hexapôle)........................................................................ 4
3.2. REMARQUE GENERALE ET CONCLUSION SUR LA CONDITION D'OSCILLATION........................................... 5
3.3. EXPRESSIONS EQUIVALENTES DE LA CONDITION D'OSCILLATION EN REGIME ETABLI .............................. 5
3.4. CONDITIONS SUR LE DEMARRAGE ET LA STABILISATION DES OSCILLATIONS........................................... 7
3.4.1. Comment une oscillation prend-elle naissance et peut grandir ? ................................................. 7
3.4.2. Modélisation du démarrage .......................................................................................................... 9
3.4.3. Stabilisation de l'oscillation en amplitude..................................................................................... 9
3.4.4. Quels sont les mécanismes qui entraînent une saturation de l'onde de sortie? .......................... 10
3.5. CONDITIONS DE STABILITE.................................................................................................................... 10
4. TECHNIQUE DE CONCEPTION DES OSCILLATEUR EN FREQUENCE RELATIVEMENT
BASSE ................................................................................................................................................................. 12
4.1. REACTION SERIE SUR UN MESFET....................................................................................................... 13
4.2. REACTION PARALLELE SUR UN MESFET.............................................................................................. 15
5. CONCEPTION D'OSCILLATEURS A REACTION SERIE (SERIES FEEDBACK
OSCILLATOR) .................................................................................................................................................. 16
5.1. QUELLE EST LA METHODOLOGIE ADOPTEE ? ......................................................................................... 18
5.2. EXEMPLE .............................................................................................................................................. 18
6. CONCEPTION DES OSCILLATEURS A REACTION PARALLELE (LOOP FEEDBACK
OSCILLATOR) .................................................................................................................................................. 20
Chapitre 2
Oscillateurs à fréquence fixe
7. OSCILLATEUR A FREQUENCE FIXE ............................................................................................... 23
7.1. OSCILLATEUR A DIODE GUNN/ CAVITE METALLIQUE EN GUIDE D'ONDE................................................ 24
7.1.1. La diode Gunn ............................................................................................................................. 24
7.1.2. Polarisation des diodes Gunn ..................................................................................................... 26
7.1.3. Oscillateurs à diodes Gunn ......................................................................................................... 26
7.2. OSCILLATEURS A RESONATEUR DIELECTRIQUE ..................................................................................... 28
7.2.1. Le résonateur diélectrique........................................................................................................... 28
7.3. OSCILLATEUR A TRANSISTOR/RESONATEUR DIELECTRIQUE(DRO)....................................................... 32
7.3.1. DRO en réflexion......................................................................................................................... 32
7.3.2. DRO en transmission................................................................................................................... 33
2

Groupe ESIEE - Département Signaux et Télécommunications
Chapitre 3
Oscillateurs à fréquence variable
8. OSCILLATEUR A FREQUENCE VARIABLE..................................................................................... 38
8.1. INTRODUCTION ..................................................................................................................................... 38
8.2. OSCILLATEURS A VARACTOR ................................................................................................................ 38
8.2.1. Le varactor .................................................................................................................................. 38
8.2.2. Oscillateur à transistor/varactor................................................................................................. 40
8.3. OSCILLATEUR ACCORDE PAR BILLE DE YIG.......................................................................................... 42
8.3.1. La bille de YiG............................................................................................................................. 42
8.3.2. Circuit oscillateur........................................................................................................................ 45
3

Chapitre 1
Théorie de l’oscillation
1. Généralités
Dans une chaîne d’émission , le signal à transmettre à la sortie du modulateur peut subir plusieurs
transpositions de fréquence avant d’être rayonné par l’antenne ; le problème est le même à la
réception où le signal doit être transposé avant d’être démodulé (récepteur à changement de fréquence
ou superhétérodyne).
Le dispositif permettant cette transposition est appelé un mélangeur. Pour un transmetteur, celui ci
reçoit sur son entrée IF (Intermediate Frequency) le signal modulé utile et sur son entrée LO (Local
Oscillator) le signal d’oscillateur local qui permet d’exciter une ou plusieurs non linéarités du
mélangeur et ainsi de permettre l’opération de transposition. L’oscillateur constitue donc un élément
de base dans une chaîne.
Il est très courant pour un récepteur de couvrir dans sa bande d’accord totale un grand nombre de
canaux. On conçoit donc que l’oscillateur local devra être capable de changer de fréquence de sortie
afin de pouvoir recevoir n’importe quel canal. Il faut remarquer que la totalité des applications de
qualité en communication associe à l’oscillateur libre (sa fréquence est fixée par un simple circuit
résonant) un synthétiseur de fréquence pour former une boucle à verrouillage de phase. Cette boucle
(on appelle parfois l’ensemble synthétiseur) programmable numériquement permet de choisir la
fréquence avec des résolutions qui dépendent du type de synthétiseurs et de la source de référence
(généralement un quartz). Hormis la puissance et la fréquence d’accord de l’oscillateur, d’autres
caractéristiques sont importantes. On peut notamment citer la stabilité en fréquence à court terme
(fluctuations rapides dans le temps qui se caractérisent par un bruit de phase) et à long terme
(fluctuations lentes (> à la seconde) dues à la variation de température, vieillissement des
composants,…).
Il existe donc beaucoup de sortes d’oscillateurs différents. Nous ne parlerons ici que de ceux utilisés
en hyperfréquences, c’est à dire pour des bandes de fréquences supérieures au GHz.
Toutefois quelque soit l’application , les caractéristiques minimales que l’on demande généralement à
cette source utilisée dans les dispositifs de communication sont les suivantes :
• une bonne pureté spectrale (harmoniques réduits)
• un bruit de phase faible (stabilité de la raie dans le temps)
• être variable en fréquence pour être associé à un synthétiseur
2. Introduction
Que ce soit depuis les très basses fréquences jusqu'aux fréquences hyper les mécanismes de démarrage et
donc les conditions d'oscillation sont bien évidemment les mêmes puisqu'ils correspondent aux mêmes
phénomènes physiques. Toutefois, selon les fréquences de travail, ces conditions sont exprimées de façon
différentes.
En hyperfréquences, elles sont généralement exprimées à l'aide du formalisme des paramètres S. Nous
ferons également le lien avec les mêmes conditions d'oscillation exprimées en impédances puis avec le
critère de Barkhausen valable pour n'importe quel système bouclé mais pour des conditions particulières
d’impédance.
En général, on s’intéresse à quatre grandeurs fondamentales lorsqu’on étudie un oscillateur :
Condition d’entretien des oscillations et stabilité de l’oscillateur
Fréquence d’oscillation et plage d’accord

Groupe ESIEE - Département Signaux et Télécommunications
Bruit de phase
Puissance délivrée
Les deux premières grandeurs seront obtenues par une approche petit signal, c’est à dire que les
paramètres du schéma électrique équivalent ont des valeurs qui ne dépendent pas du niveau d’oscillation.
Typiquement, on utilisera les paramètres S ou les paramètres impédance.
Les deux dernières font intervenir les non-linéarités de l’élément actif et doivent, en toute rigueur, être
traitées par une approche grand signal.
3. Conditions générales d'oscillation en régime établi
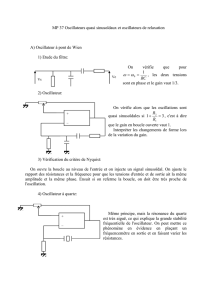
L'oscillateur étant constitué de composants actifs et passifs, il est toujours possible de le mettre sous la
forme générale d'un multiport actif et d'un multiport passif , chacun étant caractérisé par sa matrice S :
[]
′
S
′
a1
′
b1
′
an
′
bn
Multiport
passif
[]
S
a1
b1
an
bn
Multiport
actif
Figure 1 : Représentation générale d'un oscillateur
En exprimant les ondes entrantes et sortantes en fonction des paramètres S, on a :
[] [][]
[][][]
bSa
bSa
=
′=′′
Si on établit la connexion entre les deux multiports (port i connecté au port i'), on peut écrire :
[] [ ]
[] [ ]
ba
ab
′
=
′
=
Dans ce cas, il vient :
[][ ] []
{}
[]
SS a
′−′=10
Puisque
[
ne peut pas être égale à 0 (nous sommes à l'oscillation, donc de la puissance circule entre les
multiports), il faut que :
]
′
a
[][][]
01 =−
′
SS
La condition d'oscillation généralisée s'écrit :
2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
1
/
50
100%