Fonctions de transfert dans les systèmes linéaires


1) Définition1) Définition
2) Forme canonique2) Forme canonique
3) Schéma blocs3) Schéma blocs
4) Fonction de transfert d’un schéma blocs linéaire4) Fonction de transfert d’un schéma blocs linéaire
2/11
4) Fonction de transfert d’un schéma blocs linéaire4) Fonction de transfert d’un schéma blocs linéaire
5) FTBO5) FTBO
6) FTBF6) FTBF
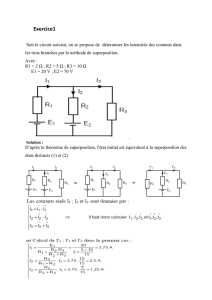
7) Théorème de superposition7) Théorème de superposition

Un système dynamique, continu, linéaire, invariant, monovariable est
1) Définition1) Définition Système
e(t) s(t)
Consigne d’entrée Variable de sortie
=×+×+×++× )(
)()(
......
)(
01
2
2
2
tsa
dttds
a
dt
tsd
a
dt
tsd
a
n
n
n
)
(
)()(
......
)(
2
t
e
b
tde
b
ted
b
ted
b
m
×
+
×
+
×
+
+
×
de la forme suivante :
décrit par une équation différentielle linéaire, à coefficients constants
3/11
)
(
......
01
2
2
t
e
b
dt
b
dt
b
dt
b
m
m
×
+
×
+
×
+
+
×
Objectif : exprimer la sortie en fonction de l’entrée sans résoudre l’équation
différentielle
Plaçons nous dans les conditions de Heaviside et utilisons le théorème de dérivation :
)()(......)()()(......)(
0101
pEbpEpbpEpbpSapSpapSpa
m
m
n
n
+++=+++
(
)
(
)
0101
......)(......)( bpbpbpEapapapS
m
m
n
n
+++×=+++×
Forme
canonique Schéma
blocs
DéfinitionDéfinition
passons dans le domaine de Laplace.
Schéma
linéaire FTBO FTBF Théorème
superposition

(
)
(
)
0101
......)(......)( bpbpbpEapapapS
m
m
n
n
+++×=+++×
FT(p) est appelée fonction de transfert ou transmittance du système.
Ainsi, la représentation du système dans le domaine de Laplace est la suivante :
FT(p)
E(p)
S(p)
)(
......
......
)( )(
01
01
pFT
apapa
bpbpb
pE pS
n
n
m
m
=
+++ +++
=
4/11
FT(p)
E(p)
S(p)
Et nous avons donc : S(p) = FT(p) x E(p)
Forme
canonique Schéma
blocs
DéfinitionDéfinition Schéma
linéaire FTBO FTBF Théorème
superposition
Nota : il est logique de prendre les conditions initiales nulles (conditions d’Heaviside)
On met en place une fonction de transfert qui traduit l’évolution du système
depuis une position d’équilibre donc les conditions initiales sont nulles.

2) Forme canonique :2) Forme canonique : toute fonction de transfert peut se mettre sous la forme
classe du système :
α
αα
α
ordre du système :
α
αα
α
+q
gain du système
: K
(
)
( )
q
q
m
m
pdpdp
pcpcK
pE pS
pFT +++× +++×
== ...1
...1
)( )(
)(
1
1
α
5/11
gain du système
: K
Zéros de la fonction de transfert : valeurs de p annulant le numérateur
Pôles de la fonction de transfert : valeurs de p annulant le dénominateur
Si
α
αα
α
=0 K est alors appelé gain statique du système.
(racines du numérateur)
(racines du dénominateur)
Schéma
blocs
Définition Schéma
linéaire FTBO FTBF Théorème
superposition
Forme Forme
canoniquecanonique
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%