Licence SPI / Parcours Ingénierie des Organisations -AMPI (version 2015) p 1
LICENCE 3 SCIENCES POUR L’INGENIEUR
Parcours Ingénierie des ORGANISATIONS
UE Optionnelle 1 – AMPI : Etude et dimensionnement des systèmes mécaniques
COURS 3 : Résistance des matériaux (RDM)
SOMMAIRE
RESISTANCE DES MATERIAUX ........................................................................................................................ 2
I. INTRODUCTION ET HYPOTHESES .......................................................................................................... 2
II. TORSEUR DES EFFORTS DE COHESION ........................................................................................... 5
III. EXTENSION - COMPRESSION ............................................................................................................... 8
IV. CISAILLEMENT ...................................................................................................................................... 14
V. MOMENTS QUADRATIQUES ............................................................................................................... 16
VI. TORSION .................................................................................................................................................. 18
VII. FLEXION .................................................................................................................................................. 20
VIII. SOLLICITATIONS COMPOSEES ...................................................................................................... 24
O. CALVET

Cours 3 :Résistance des Matériaux O.CALVET L3 SPI options AMPI
Licence SPI / Parcours Ingénierie des Organisations -AMPI (version 2015) p 2
RESISTANCE DES MATERIAUX
I. INTRODUCTION ET HYPOTHESES
I.1.
Buts de la résistance des matériaux
La résistance des matériaux a trois objectifs principaux :
la connaissance des caractéristiques mécaniques des matériaux. (comportement
sous l’effet d’une action mécanique)
l'étude de la résistance des pièces mécaniques. (résistance ou rupture)
l'étude de la déformation des pièces mécaniques.
Ces études permettent de choisir le matériau et les dimensions d'une pièce mécanique en
fonction des conditions de déformation et de résistance requises.
I.2.
Hypothèses
I.2.1. Le matériau
Continuité : la matière est supposée continue car son aspect moléculaire est trop
"fin" pour l'étude qui nous intéresse.
Homogénéité : on supposera que tous les éléments de la matière, aussi petits
soient ils, sont identiques.(hypothèse non applicable pour le béton ou le bois)
Isotropie : on supposera qu'en tout point et dans toutes les directions, la matière a
les mêmes propriétés mécaniques.(hypothèse non applicable pour le bois ou les
matériaux composites)
I.2.2. La disposition de la matière
La RDM étudie des pièces dont les formes sont relativement simples. Ces pièces sont
désignées sous le terme de « poutres ».
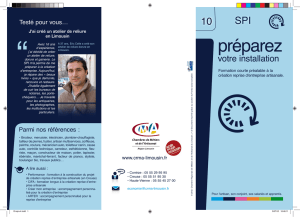
Poutre : on appelle poutre (voir
fig.1
) un solide engendré par une surface plane (S) dont le centre de
surface G décrit une courbe plane (C) appelée ligne moyenne.
Les caractéristiques de la poutre sont :
ligne moyenne droite ou à grand rayon
de courbure.
section droite (S) constante ou variant
progressivement.
grande longueur par rapport aux
dimensions transversales.
existence d'un plan de symétrie.
G
G
G
(C) Ligne moyenne
(S)
FIG.1

Cours 3 :Résistance des Matériaux O.CALVET L3 SPI options AMPI
Licence SPI / Parcours Ingénierie des Organisations -AMPI (version 2015) p 3
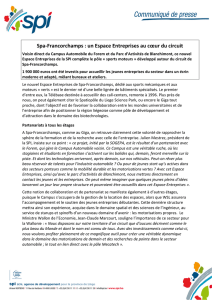
I.2.3. Les forces extérieures
Plan de symétrie : les forces extérieures seront situées dans le plan de symétrie de
la poutre ou alors disposées symétriquement par rapport à ce plan.
Types d'actions mécaniques extérieures : deux types d'actions mécaniques
peuvent s'exercer sur la poutre (voir
fig. 2
) :
Les déformations étant petites devant les dimensions de la poutre, les actions s'exerçant sur celle-ci
seront calculées à partir du principe fondamental de la statique. Les supports des forces seront eux
considérés comme constants.
II. PRINCIPE D’ETUDE D’UNE STRUCTURE EN RDM
II.1.
Régles de schématisation
Poutre représentée par sa ligne moyenne (oiu fibre de référence)
Actions de liaison schématisasées par les composantes de réaction
Actions extérieures schématisées par les forces réparties ou ponctuelles ramenées à la
ligne moyenne.
Repère de référence à représenter et report des dimansions « utiles » au calcul.

Cours 3 :Résistance des Matériaux O.CALVET L3 SPI options AMPI
Licence SPI / Parcours Ingénierie des Organisations -AMPI (version 2015) p 4
II.2.
Applications
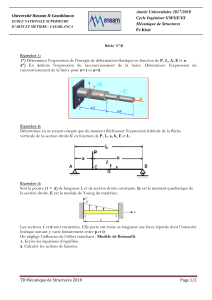
Exemple 2 :
Situation réelle
Définir le modèle RDM et son schéma associé

Cours 3 :Résistance des Matériaux O.CALVET L3 SPI options AMPI
Licence SPI / Parcours Ingénierie des Organisations -AMPI (version 2015) p 5
III. TORSEUR DES EFFORTS DE COHESION
III.1.
Contrainte
En chaque point M d’un solide, il existe des efforts intérieures que l’on met en évidence en effectuant ne coupure
du solide, par une surface S, en deux parties A et B.
La partie A, par exemple, est en équilibre sous l’action des forces intérieures qui lui sont directement appliquées
et des forces intérieures réparties sur la coupure.
Considérons un point M de S. Soir dS un élément infinitésimal de la surface S, entourant M et
n
le vecteur
unitaire, perpendiculaire en M à S et dirigé vers l’extérieur de la partie A.
On appelle contrainte en M, relativement à l’élément de surface dS orienté par sa normale extérieure
n
, le
vecteur :
dS
Fd
)n ,M(C
Le vecteur contrainte peut se décomposer en :
n.)n ,M(C
Où est la contrainte normale et le vecteur cisaillement.
III.2.
Efforts de cohésion ou efforts internes
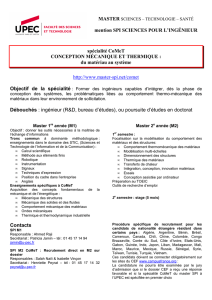
Soit une poutre (E) en équilibre sous l'action de n actions extérieures. On associe à cette poutre un
repère R (x, y, z) dont l'axe x coïncide avec la ligne moyenne de la poutre.
Coupons la poutre (E) par un plan (P) orthogonal à sa ligne moyenne, situé à l'abscisse x. On définit
ainsi deux portions de poutre (E1) et (E2).
X
Y
Z
G
x
E1
E2
Fig 5
(E) étant en équilibre, on peut écrire : {
E
E} = {0}
(E1) étant en équilibre, on peut écrire : {
E
E1} +{E2 E1} = {0}
(E2) étant en équilibre, on peut écrire : {
E
E2} +{E1 E2} = {0}
On en déduit :
{E2 E1} = -{
E
E1} = {
E
E2}
{E2 E1} est le torseur qui traduit l'action de contact de (E2) sur (E1). Cette action est due aux
efforts de cohésion qui permettent à la poutre de ne pas se "disloquer" sous l'effet d'actions
extérieures.
Fig 4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%