Cours & TD
Codeurs optiques
1 / 4
CODEURS OPTIQUES
1 PROBLEMATIQUE
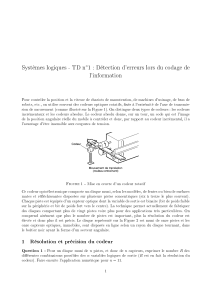
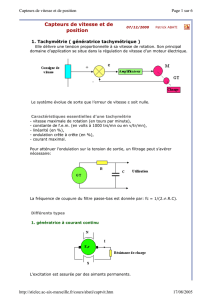
Le système d’ouverture de porte automatique
suivant nécessite la connaissance de la
position des portes, afin de le piloter
correctement.
Un codeur incrémental de résolution 1024 pt,
directement monté sur l’axe moteur, a été
choisi pour cette application.
Extrait du cahier des charges :
Vitesse d’ouverture < 0.12m/s,
Transmission Poulie (Ф=40mm) courroie,
Course totale des portes L = 1m.
Précision de positionnement p = 1mm.
Choix du capteur :
Le capteur doit permettre d’obtenir la précision souhaitée,
L’exploitation du signal du capteur permet de connaitre la
vitesse de rotation du moteur et donc la vitesse de
déplacement de la porte.
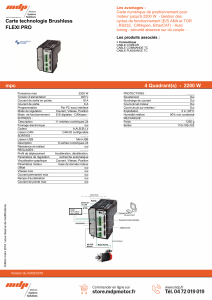
Signal obtenu :
Objectif : DETERMINER la fréquence de rotation mesurée, la relation entre le nombre d’impulsions
et la position des portes, ainsi que la précision de position.
t (s)
Nimp = 2500 impulsions
Fréquence : 500 Hz
Informations de position
et de vitesse

Cours & TD
Codeurs optiques
2 / 4
2 DEUX TYPES DE CODEUR OPTIQUE
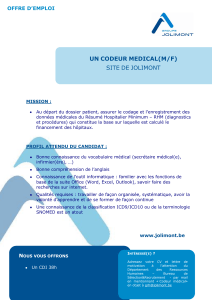
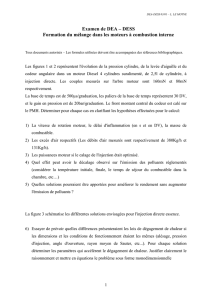
Le codeur incrémental
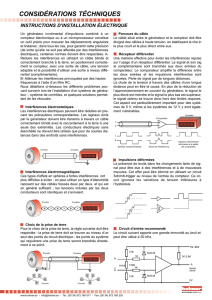
Le codeur absolu
Son disque comporte en général 3 pistes (A, B, Z). Le
nombre de fenêtre (ou points) de la piste A correspond à
la résolution du codeur.
Son disque peut comporter un grand nombre de
piste. Le codage des pistes est réalisé avec un nombre
codé en binaire.
Le déphasage entre le signal de la voie A et celui de la
voie B permet en observant le front montant de A de
déterminer le sens de rotation.
Le disque ci-dessus possède 8 pistes soit 2^8 = 256
combinaisons. Ce nombre correspond à sa résolution.
La piste intérieure (Z) permet de compter les tours.
MESURES de vitesse et de position relative.
MESURES de vitesse et de position absolue.
(position initiale connue : N = 0000 00002)
3 RESOLUTION D’UN CODEUR
La résolution d’un codeur optique correspond aux nombre de points de
mesure sur un tour entier :
Codeur incrémentale : nombre de "fenêtre".
Codeur absolue : lié au nombre n de pistes 2n.
La résolution permet de déterminer la précision de mesure du codeur.
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
A
B
A
B
Résolution de
90 points
0
9
Portes automatiques :
Résolution de 1024 pas / tr
(donnée constructeur)

Cours & TD
Codeurs optiques
3 / 4
4 DETERMINATION DE LA PRECISION
La précision d’un codeur correspond au déplacement
angulaire du disque entre :
2 impulsions dans le cas d’un codeur incrémental
2 secteurs dans Le cas d’un codeur absolu.
Cet angle est souvent exprimé en degré.
5 RELATIONS : INFORMATIONS – GRANDEURS CINEMATIQUES
Seul, le cas du codeur incrémental est traité ici …
5.1 POSITION
Expression de la position angulaire du codeur :
5.2 VITESSE
Expression de la vitesse angulaire du codeur :
5.3 INTEGRATION AU MECANISME : DEPLACEMENT DES PORTES
2 impulsions
Angle en
degré
Portes automatiques :
Précision codeur : Δθ = 360/1024 = 0,352 °
Relation Transmission : x = R.θ (θ en Rad)
Précision position : Δx = 20 x 0,352 x 2π / 360 = 0,123 mm
Portes automatiques :
Position angulaire : θ = Nimp x Δθ = 879 °
= 15,3 Rad
= 2,44 tours
θ = N x Δθ
f = 1/60xNxR
θ : position angulaire (°, rad ou tr)
Nimp : Nbre impulsion
f : fréquence du signal (Hz)
N : Fréquence de rotation (tr/min)
R : Résolution (pas/tr)
Portes automatiques :
Fréquence de rotation : N = 500x60/1024
= 29,3 Tr / minRad
Vitesse de rotation : w = 2π.N/60 = 3,07 rad/s
V et x
N et θ
V = R.w
X = R.θ
Portes automatiques :
V = 0,02 x 3,07 = 0,0614 m/s
= 61,4 mm/s
X = 0,02 x 15,3 = 0,306 m
= 30,6 cm

Cours & TD
Codeurs optiques
4 / 4
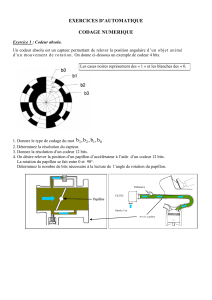
6 APPLICATION : ASTROLAB
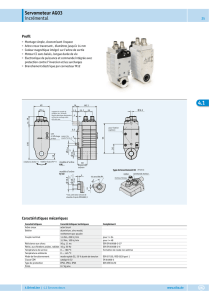
Le télescope motorisé SET assure de manière automatique le pointage et le suivi d’un objet céleste.
L’acquisition de la vitesse et de la position du tube optique s’effectue au niveau des arbres de sortie de
chacun des moteurs d’axe à l’aide de capteurs spécifiques appelés « codeurs ».
L’émetteur infra-rouge est une LED spéciale, les récepteurs sont deux photo-transistors T1 et T2. Le
disque, lié à l’arbre de sortie du moteur, provoque, lorsqu’il tourne, la coupure et le rétablissement du
faisceau lumineux entre la LED et les transistors. Il s’ensuit que les transistors sont alternativement
bloqués ou saturés.
Relevés des signaux ENCA et ENCB dans le sens direct puis inverse :
Q1. Quelle est la vitesse de rotation du moteur pour chaque sens ?
Q2. Sachant que le rapport de réduction entre l’axe de sortie de l’embase et l’arbre du moteur d’azimut
vaut 1/12320, à combien d’impulsions du codeur correspond un tour de l’embase ?
En déduire le format binaire (nombre de bits) minimal du compteur associé.
Q3. Pourquoi le codeur a-t-il 2 signaux de sortie ENCA et ENCB ? Expliquer en détail.
Arbre de sortie moteur
Disque denté
Emetteur infra-rouge
Récepteurs infra-rouge
LED
T1
T2
VT1
VT2
1
/
4
100%