EXERCICES D’AUTOMATIQUE
CODAGE NUMERIQUE
Exercice 1 : Codeur absolu.
Un codeur absolu est un capteur permettant de relever la position angulaire d’un objet animé
d’un mouvement d e rotation.
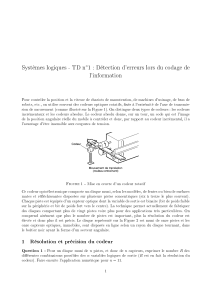
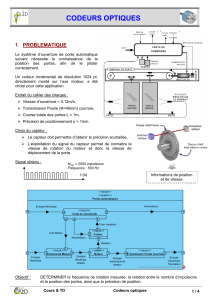
On donne ci-dessous un exemple de codeur 4 bits.
1. Donnez le type de codage du mot
3 2 1 0
b ,b ,b ,b
2. Déterminez la résolution du capteur.
3. Donnez la résolution d’un codeur 12 bits.
4. On désire relever la position d’un papillon d’accélérateur à l’aide d’un codeur 12 bits.
La rotation du papillon se fait entre 0 et 90°.
Déterminez le nombre de bits nécessaire à la lecture de l’angle de rotation du papillon.
Les cases noires représentent des « 1 » et les blanches des « 0.

Exercice 2 : Girouette
La mesure de la direction du vent constitue une donnée très
importante en micro-climatologie. La grande majorité des
dispositifs est basée sur le principe de la girouette. On ajoute
ensuite un dispositif électronique de mesure de la position
angulaire. On peut utiliser soit un simple potentiomètre dont le
curseur est aligné avec la direction de la girouette, dans ce cas les
données sont analogiques, soit un codeur optique associé à l'axe
pivotant de la girouette, dans ce cas le signal est discret et
dépend de la résolution du codeur
.
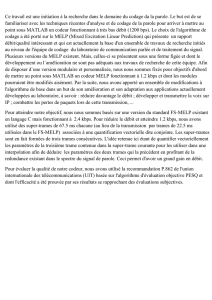
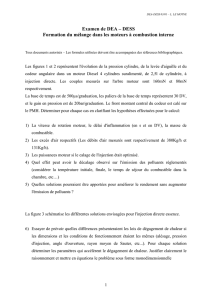
On s'intéresse à une girouette permettant de repérer 8 directions suivantes :
N, NE, SE,E, S, SO, O, NO
Le principe de fonctionnement est le suivant :
On utilise un codeur à n pistes qui permet de différencier 2 n directions du vent. On dispose
sur une
plaque
émettrice
un
alignement
de
n
diodes infrarouges et, en face d'elles, un jeu de n
récepteurs
qui reçoivent ou non un faisceau infra rouge.
On
dispose entre émetteurs et récepteurs
un disque solidaire de l'axe de la girouette comportant des zones opaques gravées en code gray ce
qui permet d'identifier numériquement la position angulaire de
la girouette
.
Question 1 : Combien de diodes photoélectriques doit-on utiliser pour coder le nombre de
directions
correspondant au cahier des charges ?
Question 2 : Compléter le disque en noircissant les différentes cases
selon le principe du code Gray sachant que les positions N et
NE sont déjà complétées. Quel est l'intérêt d'utiliser un code
Gray plutôt qu'un code binaire naturel ?
Question 3
Donnez la résolution de ce capteur.
Question 4
On souhaite modifier le capteur afin de pouvoir repérer 16 positions angulaires.
Proposer les modifications à prévoir et le nouveau codage.

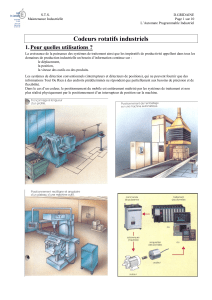
Problème 3 : Codage et commande d'une barrière.
La barrière comprend: Voir Figures 1 et 2.
La partie principale composée d'un bâti scellé au sol, et d'une lisse relevable de longueur L=2 m par une
motorisation située à l'intérieur du pied. La plus grande partie de la rotation est faite en grande vitesse (GV),
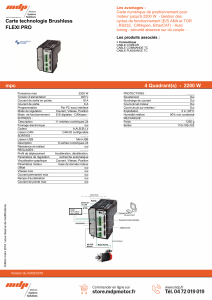
la phase finale se faisant en petite vitesse (PV) afin d'éviter les chocs. On utilise un codeur absolu (Figure 3)
lié à l'axe de rotation de la lisse pour repérer sa position.
Pour connaître la position de la lisse, un codeur absolu 8 bits est accouplé sur l'axe de la barrière. Son but est
de repérer les 4 positions particulières (1, 2, 3, 4) indiquées figure 1. Il donne, en binaire, l'angle que fait la
lisse avec l'horizontale. Il est calé angulairement de manière à avoir
0
L0
lorsque la lisse est en position 1
le code délivré sera alors égal à "0 0 0 0 0 0 0 0".
3.1 Déterminez la précision angulaire
L
p
(en degrés) du positionnement de la lisse.
3.2 Calculer alors la précision de positionnement
p
p
en mm à l'extrémité de la lisse.
Figure 3 exemple:
codeur 5 bits
Figure 1
Figure 2

3.3 Le tableau ci-dessous indique les valeurs binaires obtenues sur les sorties du codeur pour chacune des
quatre positions. Compléter les cases d'angle et décimal du tableau. Pour les angles justifiez les calculs et
arrondir au degré le plus proche.
position
Angle
L
décimal
1
0°
0
0
0
0
0
0
0
0
0
4
0
0
0
0
0
1
1
1
3
0
0
1
1
1
0
0
1
2
90°
0
1
0
0
0
0
0
0
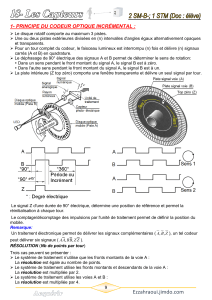
Probléme 4 :Machine à couper les câbles en aéronautique
On désire couper des câbles de 3 mètres avec une précision de 0,2 mm maximum.
Les rouleaux d'entrainement de diamètre D=100mm entrainent le câble en translation, un couteau effectue
ensuite la mise à longueur. On utilise un codeur angulaire sur un des rouleaux. Un automate gère ensuite les
signaux.
1-Déterminer le nombre de bits du codeur pour obtenir la précision désirée.
2-Déterminez la précision réelle de la coupe.
3-Déterminez le nombre d'impulsions fournies par le codeur pour une longueur de câble de 3 mètres.
sorties du codeur absolu
1
/
4
100%