Intégrales dépendant d'un paramètre : Continuité et dérivabilité
Telechargé par
ZMOUR Lhassan

Intégrales dépen-
dant d’un paramètre
Très souvent, la solution d’une équation différentielle aboutit au calcul d’une primitive :
F(x) = Zb
a
f(x,t)dt.
Dans de nombreux cas, il n’y a pas de forme explicite pour cette primitive et il faut donc étudier la fonction
F
(
x
)
telle qu’elle nous est donnée, c’est-à-dire sous la forme d’une intégrale, qui dépend du paramètre
x
. Dans ce chapitre
nous donnons des conditions afin que cette fonction
F
(
x
)soit continue et dérivable. Le point-clé des démonstrations
sera la continuité uniforme. Nous appliquons ces méthodes à la transformation de Laplace et à celle de Fourier. Ne
vous lancez pas dans ce chapitre sans de solides bases d’analyse : révisez les chapitres sur les limites, la continuité, la
dérivabilité, et l’intégration.
1. Continuité et dérivabilité d’une intégrale dépendant d’un para-
mètre
1.1. Fonction définie par une intégrale
Soit
f
:(
x,t
)
7−→ f
(
x,t
)une fonction de deux variables,
x
et
t
. Nous considérons
x
comme un paramètre et
t∈
[
a,b
]
comme une variable d’intégration. Cela nous permet de définir
F(x) = Zb
a
f(x,t)dt.
Un
x
étant fixé, pour que
F
(
x
)existe, il suffit que l’application partielle
t7→ f
(
x,t
)soit continue sur [
a,b
]. Mais ceci
ne garantit pas la continuité de la fonction
F
. Nous donnons des conditions suffisantes pour que
F
soit continue, puis
dérivable.
1.2. Continuité
Théorème 1.
Soient
I
un intervalle de
R
et
J
= [
a,b
]un intervalle fermé borné. Soit
f
une fonction continue sur
I×J
à valeurs
dans R(ou C). Alors la fonction F définie pour tout x ∈I par
F(x) = Zb
a
f(x,t)dt
est continue sur I.
Exemple 1.
Soit
F(x) = Zπ
0
sin(x+t)·ex t2dt,
définie pour
x∈I
=
R
. La fonction (
x,t
)
7→ f
(
x,t
) =
sin
(
x
+
t
)
·ex t2
est continue sur
R×
[0
,π
], donc la fonction
x7→ F(x)est continue sur R.

INTÉGRALES DÉPENDANT D’UN PARAMÈTRE 1. CONTINUITÉ ET DÉRIVABILITÉ D’UNE INTÉGRALE DÉPENDANT D’UN PARAMÈTRE 2
On calcule que
F
(0) =
Rπ
0sin
(
t
)
·
1
dt
=
−cos
(
t
)
π
0
=2. Même si on n’a pas de formule pour
F
(
x
)en général, on
déduit de la continuité que F(x)→F(0) = 2 lorsque x→0.
Les démonstrations de cette section utilisent la continuité uniforme, qui fait l’objet de la section suivante.
Démonstration.
Soit
x0
un point de
I
. Quitte à restreindre l’intervalle en considérant
I∩
[
x0−α,x0
+
α
], on suppose
que
I
est un intervalle fermé borné. Le théorème de Heine (théorème 6) s’applique alors à la fonction
f
sur
I×J
:
elle est donc uniformément continue. En particulier, pour tout ε > 0, il existe δ > 0 tel que, pour tout t ∈J,
|x−x0|< δ =⇒f(x,t)−f(x0,t)6ε
b−a.
Dans ce cas,
F(x)−F(x0)=Zb
af(x,t)−f(x0,t)dt
6Zb
af(x,t)−f(x0,t)dt
6(b−a)ε
b−a=ε.
Donc Fest continue en x0.
1.3. Dérivabilité
Théorème 2.
Soient I un intervalle de Ret J = [a,b]un intervalle fermé borné. On suppose que :
•(x,t)7−→ f(x,t)est une fonction continue sur I ×J (à valeurs dans Rou C),
•la dérivée partielle (x,t)7−→ ∂f
∂x(x,t)existe et est continue sur I ×J.
Alors la fonction F définie pour tout x ∈I par F(x) = Zb
a
f(x,t)dt est de classe C1sur I et :
F0(x) = Zb
a
∂f
∂x(x,t)dt.
On peut retenir l’abréviation mnémotechnique d’interversion dérivée/intégrale :
d
dxZb
a
=Zb
a
∂
∂x
Exemple 2.
Étudions F(x) = R1
0
dt
x2+t2pour x∈]0,+∞[. Posons f(x,t) = 1
x2+t2. Alors :
•fest continue sur ]0,+∞[×[0,1],
•∂f
∂x(x,t) = −2x
(x2+t2)2est continue sur ]0,+∞[×[0,1].
On aura donc
F0(x) = Z1
0
−2x
(x2+t2)2dt.
Pour cet exemple on peut calculer explicitement F(x):
•F(x) = 1
x2Z1
0
dt
1+t
x2=1
xharctan t
xit=1
t=0=1
xarctan 1
x.
•F0(x) = d
dx1
xarctan 1
x=−1
x2arctan 1
x−1
x3
1
1+x−2.
•Ce qui prouve Z1
0
−2x
(x2+t2)2dt=−1
x2arctan 1
x−1
x(1+x2).

INTÉGRALES DÉPENDANT D’UN PARAMÈTRE 1. CONTINUITÉ ET DÉRIVABILITÉ D’UNE INTÉGRALE DÉPENDANT D’UN PARAMÈTRE 3
Démonstration.
Soit
x0∈I
. Pour simplifier l’écriture nous supposerons que
x0
n’est pas une extrémité de
I
. Nous
devons démontrer que, pour tout ε > 0, il existe δ > 0 tel que, pour tout x∈[x0−δ,x0+δ]et x6=x0:
F(x)−F(x0)
x−x0−Zb
a
∂f
∂x(x0,t)dt
6ε.
Écrivons :
F(x)−F(x0)−(x−x0)Zb
a
∂f
∂x(x0,t)dt
=Zb
af(x,t)−f(x0,t)−(x−x0)∂f
∂x(x0,t)dt
6Zb
af(x,t)−f(x0,t)−(x−x0)∂f
∂x(x0,t)dt.
Par le théorème des accroissements finis, pour tout t∈[a,b], il existe x1strictement compris entre x0et xtel que
f(x,t)−f(x0,t) = (x−x0)∂f
∂x(x1,t).
Fixons
α >
0 tel que [
x0−α,x0
+
α
]soit inclus dans
I
: la dérivée partielle
∂f/∂ x
est uniformément continue sur
[
x0−α,x0
+
α
]
×
[
a,b
], d’après le théorème de Heine (théorème 6). Il existe donc
δ >
0 tel que, pour tout
x
vérifiant
|x−x0|< δ et pour tout t ∈[a,b],
∂f
∂x(x,t)−∂f
∂x(x0,t)<ε
b−a.
Si |x−x0|< δ, alors tout x1strictement compris entre x0et xest encore tel que |x1−x0|< δ, donc :
∂f
∂x(x1,t)−∂f
∂x(x0,t)<ε
b−a.
En reportant dans l’expression ci-dessus, on obtient :
f(x,t)−f(x0,t)−(x−x0)∂f
∂x(x0,t)=(x−x0)∂f
∂x(x1,t)−(x−x0)∂f
∂x(x0,t)
6|x−x0|ε
b−a.
Il reste à intégrer par rapport à tentre aet b:
F(x)−F(x0)−(x−x0)Zb
a
∂f
∂x(x0,t)dt
6Zb
a|x−x0|ε
b−adt=|x−x0|ε,
d’où le résultat en divisant par |x−x0|.
Exemple 3.
Calculons l’intégrale de Gauss :
Z+∞
0
e−t2dt=pπ
2
e−t2
Posons, pour x∈I= [0, +∞[:
F(x) = Z1
0
e−x2(t2+1)
t2+1dt G(x) = Z x
0
e−t2dt2
H(x) = F(x) + G(x)
1. Étude de F(x).
En posant f(x,t) = e−x2(t2+1)
t2+1, on note que :
•fest une fonction continue sur [0,+∞[×[0,1],
•∂f
∂x(x,t) = −2xe−x2(t2+1)est aussi continue.
Donc, par le théorème 2,Fest continue, dérivable et
F0(x) = Z1
0
∂f
∂x(x,t)dt=−2Z1
0
xe−x2(t2+1)dt=−2xe−x2Z1
0
e−x2t2dt.

INTÉGRALES DÉPENDANT D’UN PARAMÈTRE 1. CONTINUITÉ ET DÉRIVABILITÉ D’UNE INTÉGRALE DÉPENDANT D’UN PARAMÈTRE 4
2. Étude de G(x).
G
n’est pas à proprement parler une intégrale dépendant d’un paramètre. Si on note
G0
(
x
) =
Rx
0e−t2dt
,
G0
est
simplement une primitive de
x7→ e−x2
et
G
(
x
) =
G0
(
x
)
2
. Comme
G0
0
(
x
) =
e−x2
(la dérivée d’une primitive est la
fonction elle-même), on a :
G0(x) = d
dxG0(x)2=2G0
0(x)G0(x) = 2e−x2Zx
0
e−t2dt=2xe−x2Z1
0
e−x2u2du
Pour la dernière égalité, on a posé le changement de variable
t
=
xu
(et donc
dt
=
xdu
,
u
=
t
x
et
u
varie de 0 à 1
lorsque tvarie de 0 à x).
3. Étude de H(x).
Par nos calculs précédents, on trouve
H0
(
x
) =
F0
(
x
) +
G0
(
x
) = 0, pour tout
x∈
[0
,
+
∞
[. Cela veut dire que la
fonction Hest une fonction constante. Or
H(0) = F(0) + G(0) = Z1
0
1
t2+1dt+0=arctan t1
0=π
4.
Donc Hest la fonction constante égale à π
4.
4. Limite de H(x)en +∞.
•Lorsque x→+∞, alors G(x)→R+∞
0e−t2dt2.
•Et F(x)→0 car
F(x)=Z1
0
e−x2(t2+1)
t2+1dt
6Z1
0
e−x2dt=e−x2Z1
0
1·dt=e−x2→0.
•Donc H(x) = F(x) + G(x)→R+∞
0e−t2dt2.
5. Conclusion.
H
est une fonction constante :
H
(
x
) =
π
4
, sa limite en +
∞
est donc aussi
π
4
. Mais on a calculé cette limite d’une
autre façon, ce qui prouve :
Z+∞
0
e−t2dt=sπ
4=pπ
2
1.4. Théorème de Fubini
Théorème 3 (Théorème de Fubini).
Soient
I
= [
α,β
]et
J
= [
a,b
]deux intervalles fermés bornés. Soit
f
une fonction continue sur
I×J
, à valeurs dans
R
(ou C). Alors la fonction F définie pour tout x ∈I par
F(x) = Zb
a
f(x,t)dt
est intégrable sur I et
Zβ
α
F(x)dx=Zβ
αZb
a
f(x,t)dtdx=Zb
aZβ
α
f(x,t)dxdt.
On retient que l’on peut intervertir l’ordre d’intégration :
Zβ
αZb
a
=Zb
aZβ
α
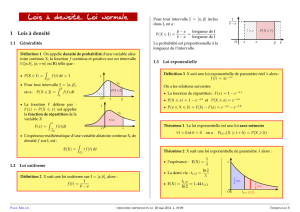
Géométriquement, on se souvient que calculer une intégrale
Rb
af
(
t
)
dt
revient à déterminer l’aire sous le graphe,
comme somme de segments de hauteur f(t). Ces segments sont en fait des rectangles de largeur infinitésimale dt.

INTÉGRALES DÉPENDANT D’UN PARAMÈTRE 1. CONTINUITÉ ET DÉRIVABILITÉ D’UNE INTÉGRALE DÉPENDANT D’UN PARAMÈTRE 5
x
t
α
β
a
b
x
t
α
β
a
b
Ici, pour nos fonctions de deux variables, on calcule d’abord l’aire d’une tranche parallèle à l’axe des
t
(en vert sur
la figure), puis on fait la somme (c’est-à-dire on effectue une seconde intégration) des aires de toutes les tranches
(qui ont en fait une épaisseur infinitésimale). On pourrait faire la même opération en commençant par les tranches
parallèles à l’axe des
x
(en rouge sur la figure). Le théorème de Fubini affirme que ces deux méthodes conduisent à la
même valeur. Ce nombre correspond au volume sous la portion de surface.
Exemple 4.
Calculons :
I=Zπ
0Z1
0
(tsin x+2x)dtdx
Première méthode. On intègre d’abord par rapport à t, puis à x:
I=Zx=π
x=0Zt=1
t=0
(tsin x+2x)dtdx=Zx=π
x=0t2
2sin x+2x tt=1
t=0dx
=Zx=π
x=0sin x
2+2xdx=−cos x
2+x2x=π
x=0=π2+1
Seconde méthode.
On utilise le théorème de Fubini qui affirme que l’on peut d’abord intégrer par rapport à
x
, puis
par rapport à t:
I=Zx=π
x=0Zt=1
t=0
(tsin x+2x)dtdx=Zt=1
t=0Z x=π
x=0
(tsin x+2x)dxdtpar Fubini
=Zt=1
t=0−tcos x+x2x=π
x=0dt=Zt=1
t=0
(2t+π2)dt=t2+π2tt=1
t=0=π2+1
Démonstration.
Par le théorème 1, la fonction
F
est continue sur
I
, donc intégrable. Pour
x∈I
, considérons la
fonction :
ϕ(x,t) = Zx
α
f(y,t)dy.
C’est une fonction continue sur
I×J
. (Pour le prouver considérer
ϕ
(
x,t
)
−ϕ
(
x0,t0
) =
Rx
x0f
(
y,t
)
dy
+
Rx0
af
(
y,t
)
−
f
(
y,t0
)
dy
. Le premier terme est petit pour
x
proche de
x0
car
f
est bornée ; le second est petit par continuité
uniforme de f, exactement comme dans la preuve théorème du 1.)
La dérivée partielle par rapport à
x
de
ϕ
(
x,t
)est
∂ ϕ
∂x
(
x,t
) =
f
(
x,t
), qui est elle aussi continue sur
I×J
. On peut
donc lui appliquer le théorème 2. La fonction qui à xassocie
Φ(x) = Zb
a
ϕ(x,t)dt=Zb
aZ x
α
f(y,t)dydt
est dérivable et sa dérivée est :
Φ0(x) = Zb
a
∂ ϕ
∂x(x,t)dt=Zb
a
f(x,t)dt.
On obtient donc, pour tout x∈I:
Zb
aZ x
α
f(y,t)dydt=Φ(x) = Zx
α
Φ0(y)dy=Zx
αZb
a
f(y,t)dtdy.
D’où le résultat en prenant x=β.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%