Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie mécanique B 5 150 − 1
B 5 150 4 - 1997
Dynamique des structures
Techniques d’analyse et d’essai
par Alain GIRARD
Expert technique de la division Études et Recherche d’INTESPACE
Professeur vacataire à l’École nationale supérieure de l’aéronautique et de l’espace
et à l’École nationale supérieure d’ingénieurs de constructions aéronautiques
es structures se rencontrent dans tous les domaines : ce sont elles qui
assurent une fonction de support pour des objets de toutes natures. Ainsi,
un mât, un pont, un bâtiment, une caisse de voiture, un fuselage d’avion..., sont
des structures plus ou moins complexes, dont la première mission est de résister
à l’environnement.
Si l’environnement est statique, c’est-à-dire ne dépendant pas du temps,
comme la gravité ou une pression constante, il s’agit de vérifier que les
contraintes restent dans les limites admissibles par les matériaux.
Si l’environnement dépend du temps, il faut d’abord étudier le mouvement
qui en résulte. Ce comportement dynamique peut, par amplification, donner
lieu à des niveaux bien supérieurs à ceux du comportement statique. Il importe
donc de maîtriser la prévision de ces phénomènes pour comprendre, remédier,
optimiser : c’est l’objet de la dynamique des structures.
La prévision peut reposer sur deux types d’activités : l’analyse et l’expérimen-
tation. Négliger l’un au profit de l’autre est dangereux : l’analyse seule n’est pas
suffisamment fiable, l’expérimentation seule ne donne pas une vue complète
de la situation. Aussi, ces deux mondes doivent-ils être parfaitement imbriqués
dans le développement d’une structure.
Cet article est une introduction aux techniques d’analyse et d’essai en dyna-
mique des structures. Des généralités sur les techniques d’analyse seront d’abord
présentées pour poser le problème et parler de sa résolution. La formulation
est ensuite développée, tout en restant limitée au profit des résultats pratiques
et en insistant sur la compréhension physique des phénomènes. Enfin, les tech-
niques expérimentales sont abordées, en relation avec l’analyse.
Pour plus de détails, on se reportera aux références bibliographiques donnant quelques
ouvrages ou publications de base et, notamment, à la référence [19] qui donne une vue
d’ensemble sur le sujet.
1. Généralités sur les techniques d’analyse.......................................... B 5 150 - 2
1.1 Problème et solutions ................................................................................. — 2
1.2 Techniques d’analyse .................................................................................. — 4
2. Analyse dynamique des systèmes ...................................................... — 6
2.1 Système à un degré de liberté.................................................................... — 6
2.2 Systèmes à N degrés de liberté.................................................................. — 8
2.3 Approche modale ........................................................................................ — 11
2.4 Systèmes continus ...................................................................................... — 16
2.5 Sous-structuration....................................................................................... — 17
2.6 Conclusions sur l’analyse ........................................................................... — 18
3. Techniques expérimentales................................................................... — 18
3.1 Généralités ................................................................................................... — 18
3.2 Identification par essai modal .................................................................... — 19
3.3 Simulation par générateurs de vibrations................................................. — 20
4. Conclusion ................................................................................................. — 21
Références bibliographiques ......................................................................... — 21
L

DYNAMIQUE DES STRUCTURES ___________________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
B 5 150 − 2© Techniques de l’Ingénieur, traité Génie mécanique
1. Généralités sur les techniques
d’analyse
1.1 Problème et solutions
1.1.1 Structure et conditions aux limites
On considère une structure soumise à un environnement dyna-
mique donné. Des forces de diverses natures (volumiques, sur-
faciques, ponctuelles) s’appliquent sur elle et provoquent un
mouvement que l’on peut décrire par des déplacements, des vitesses
ou des accélérations en tous ses points. La notion d’appui, ou de
condition aux limites, est souvent réservée aux parties de la structure
où le mouvement est bloqué (déplacements correspondants impo-
sés nuls). Elle peut être généralisée à un mouvement imposé
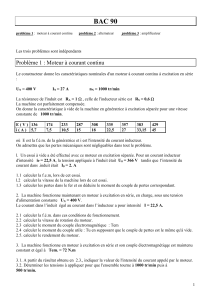
quelconque. Ainsi, toute structure peut être décomposée en deux
parties exclusives, comme schématisé figure 1 :
— une partie où des forces sont imposées (éventuellement
nulles) : ce sont les forces d’excitation. Le mouvement de cette partie
est alors une réponse. On qualifiera par la suite cette partie d’interne
et on lui affectera l’indice mnémotechnique i ;
— une partie où le mouvement est imposé (éventuellement nul) :
ce sont les conditions aux limites (éventuellement absentes). Les
forces de réaction correspondantes sont alors des réponses. On qua-
lifiera par la suite cette partie de jonction (ou liaison, ou interface)
pour lui affecter l’indice mnémotechnique j.
Cette décomposition naturelle, d’une grande généralité, va
influer sur les développements qui suivent de manière fondamen-
tale.
1.1.2 Structure et discrétisation
Toute structure réelle est continue au départ. Quelle que soit la
nature de l’excitation et de la réponse, les équations qui régissent
le mouvement sont des équations aux dérivées partielles. La diffi-
culté de les résoudre analytiquement dans le cas de structures
complexes incite à discrétiser ces dernières, par exemple par la
méthode des éléments finis. Dans ce cas, les équations deviennent
matricielles, la taille des matrices dépendant directement de la dis-
crétisation considérée.
Un cas intermédiaire est celui d’une structure continue avec des
excitations (en force ou en mouvement) discrètes. Les équations
restent aux dérivées partielles, mais les résultats peuvent se mettre
sous forme matricielle.
Notations et symboles
Symbole Désignation
Scalaires,
matrices
C, c amortissement visqueux, combinaison linéaire
Emodule d’Young
Fforce
ffréquence
Gflexibilité (déplacement/force)
Hfonction de transfert, facteur d’amplification
dynamique
hréponse impulsionnelle
Ι
identité, inertie
i
K, k raideur (force/déplacement)
Lfacteur de participation modale, longueur
M, m masse (force/accélération)
Qamplification à résonance : Q = 1/(2
ζ
)
qdéplacement modal
Sdensité spectrale de puissance (DSP), section
Ttransmissibilité (déplacement/déplacement, ...)
ttemps
u, v, w déplacement physique
xcoordonnée (position)
ζ
amortissement visqueux réduit
η
amortissement structural
λ
valeur propre
θ
rotation
Φ
mode propre
φ
coefficient de cisaillement
Ψ
mode de jonction
ω
pulsation :
ω
= 2 π f
Abréviations
ddl degré de liberté
DSP densité spectrale de puissance
Indices
d dynamique
e élément
i interne
j jonction (appui)
kmode propre
mrelation linéaire (multi-ddl)
r rigide (jonction isostatique)
res résiduel
s sélection, secondaire
x, yexcitation, réponse
x, y, zrepère cartésien
Exposants
Ttransposé
* conjugué
•
paramètre effectif
1
–
∂∂t⁄
X
Exemple d’un pylône
La jonction j sera constituée de tous les points d’ancrage au sol, la
partie interne i de tout le reste. Des forces, par exemple dues au vent,
éventuellement nulles par endroits, pourront être imposées sur la partie
interne. Un mouvement, par exemple dû à un tremblement de terre,
pourra être imposé sur la jonction. Sous l’action, éventuellement simul-
tanée, de ces deux sollicitations, la partie interne répondra par un mou-
vement et la jonction par des forces de réaction.
Figure 1 – Structure et conditions aux limites

__________________________________________________________________________________________________________ DYNAMIQUE DES STRUCTURES
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie mécanique
B 5 150
−
3
Par la suite, on se place toujours dans le cas d’excitations
discrètes ou discrétisées. De plus, sauf avis contraire, on considère
des structures discrétisées. L’état de la structure est alors défini par
un nombre fini de paramètres que l’on appelle
degrés de liberté
(en abrégé ddl) et sur lesquels on rapporte les excitations comme
les réponses. Une approche continue peut être faite sur les mêmes
bases, mais n’est pas développée ici, son application pratique
restant limitée : seuls des cas particuliers simples sont abordés au
paragraphe 2.4 pour servir de référence.
1.1.3 Domaine temporel et domaine fréquentiel
L’analyse du comportement dynamique d’une structure soumise
à une excitation quelconque peut, d’une manière générale, être effec-
tuée en restant dans le
domaine temporel
. Ainsi, si l’on considère
une excitation fonction du temps
x
(
t
), la réponse structurale
y
(
t
)
sera, sous réserve de linéarité, donnée par la relation (intégrale dite
de Duhamel) :
(1)
où
h
yx
(
t
) est la réponse
y
à une excitation
x
sous forme d’impul-
sion unité.
Cette relation (1) s’interprète en disant que le résultat est la super-
position des réponses à l’excitation décomposée en impulsions.
Cette approche nécessite donc le calcul d’une intégrale.
Une autre solution consiste à passer dans le
domaine des fré-
quences
f
(ou des pulsations
ω
= 2
π
f
), ce qui conduit à des opéra-
tions différentes et permet des interprétations complémentaires.
Cela peut être fait grâce à la transformée de Fourier qui, par sa réver-
sibilité, permet une bonne communication entre les deux domaines,
à certaines réserves près (cf. ouvrages de base sur le traitement du
signal) :
(2)
La première relation exprime la décomposition de la fonction du
temps en fonctions sinusoïdales et la deuxième reconstitue cette
même fonction à partir de ces fonctions sinusoïdales.
X
(
ω
) est une
fonction complexe, avec partie réelle et partie imaginaire, ou ampli-
tude et phase.
Dans le domaine des fréquences, l’équivalent de la relation (1)
s’écrit :
(3)
où
H
yx
(
ω
) est la réponse
y
à une excitation
x
sous forme de
sinusoïde de pulsation
ω
.
C’est une fonction complexe de la fréquence, dite
fonction de
transfert
, dont l’amplitude traduit l’amplification du mouvement et
la phase le déphasage entre excitation et réponse à la fréquence
considérée. C’est en fait la transformée de Fourier de
h
yx
(
t
), ce qui
justifie sa notation.
La relation (3) fait intervenir un simple produit, au lieu d’une inté-
grale dans (1), la liaison avec le domaine temporel étant assurée par
transformée de Fourier. C’est cette approche qui sera adoptée par
la suite, avec une présentation centrée sur l’utilisation des fonctions
de transfert.
Dans le cas de plusieurs excitations et/ou de plusieurs réponses,
la relation (3) peut se généraliser, toujours sous réserve de linéarité,
avec l’emploi du formalisme matriciel.
H
yx
représente alors une
matrice de fonctions de transferts entre le vecteur des excitations
X
et le vecteur des réponses
Y
. Ce formalisme nécessite l’emploi
de notations appropriées pour développer efficacement la
formulation : elles sont introduites au paragraphe 1.2.1.
1.1.4 Basses fréquences et hautes fréquences
Plus les fréquences d’excitation sont élevées, plus les longueurs
d’onde sont faibles et plus les formes engendrées par les réponses
sont complexes. Les méthodes de discrétisation habituelles
s’essoufflent
, soit par le volume de calcul engendré, soit par les
erreurs dues à une perte d’information. Le seuil au-delà duquel leur
efficacité devient médiocre délimite le domaine des
basses fré-
quences
: c’est celui où l’on sait caractériser économiquement le
comportement dynamique des structures et calculer ainsi de
manière convenable leurs réponses à une excitation de nature
quelconque.
On verra plus loin que la caractérisation dynamique d’une struc-
ture peut être faite en introduisant la notion de
mode propre
, qui
est une forme associée à une fréquence. La basse fréquence est
alors le domaine qui n’implique qu’un nombre limité de modes
propres. Ce domaine dépend donc essentiellement de la structure
considérée.
En
haute fréquence
, le mode propre devient une caractéristique
trop volumineuse, et l’on doit faire appel à des notions plus globales
comme la
densité modale
. En fait, ces méthodes sont surtout uti-
lisées pour des sollicitations acoustiques, domaine où la formulation
est difficile [13]. La plus connue est celle de l’analyse énergétique
statistique (
Statistical Energy Analysis
: SEA). Ces problèmes ne sont
pas abordés ici.
1.1.5 Différents types de mouvements
Dans le domaine fréquentiel, l’excitation la plus simple est
l’excitation sinusoïdale de fréquence
f
=
ω
/2
π
, de type
x
(
t
) =
X
max
sin (
ω
t
+
ϕ
). En utilisant le formalisme complexe, elle se
note
x
(
t
) =
X
e
i
ω
t
,
X
pouvant être complexe, son amplitude étant
l’amplitude du mouvement et sa phase étant le déphasage à
t
= 0.
La réponse d’une structure linéaire est une fonction sinusoïdale
de même fréquence
y
(
t
) =
Y
e
i
ω
t
,
Y
étant donnée par :
Y
=
H
yx
(
ω
)
X
(4)
conséquence directe de la relation (3).
Dans le cas d’une excitation périodique, donc décomposable en
un nombre fini de fonctions sinusoïdales, on peut appliquer la
relation (4) à chaque harmonique et reconstituer ensuite le signal
temporel.
Une excitation
x
(
t
) qui ne dure qu’un temps limité sera qualifiée
de transitoire. Dans ce cas, suivant la stratégie préconisée au
paragraphe 1.1.3, on peut encore utiliser la relation (3) grâce à la
transformée de Fourier (TF) :
(5)
X
ω
() ∞–
+∞
xt()ei–
ω
tdt=xt() 1
2π
-------
∞
–
+
∞
X
ω
()
e
i
ω
t
d
ω
=
⇔
Exemple
Si l’excitation est une superposition de deux fonctions sinusoïdales :
x
(
t
) =
x
1
sin (
ω
1
t
+
ϕ
x
1
) +
x
2
sin (
ω
2
t
+
ϕ
x
2
)
la transformée de Fourier va extraire ces deux fonctions (
ω
1
,
x
1
,
ϕ
x
1
) et (
ω
2
,
x
2
,
ϕ
x
2
), la relation
(3)
va calculer les deux réponses
sinusoïdales correspondantes avec les amplitudes
y
1
= |
H
(
ω
1
)|
x
1
et
y
2
= |
H
(
ω
2
)|
x
2
et les phases
ϕ
y
1
=
ϕ
x
1
+
ϕ
[
H
(
ω
1
)] et
ϕ
y
2
=
ϕ
x
2
+
ϕ
[
H
(
ω
2
)], et la transformée inverse restituera
y
(
t
) =
y
1
sin(
ω
1
t
+
ϕ
y
1
) +
y
2
sin(
ω
2
t
+
ϕ
y
2
).
Y
ω
() Hyx
ω
()
X
ω
()
=
xt
()
X
ω
()
TF Y
ω
()
yt
()
TF
1
–

DYNAMIQUE DES STRUCTURES ___________________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
B 5 150
−
4
© Techniques de l’Ingénieur, traité Génie mécanique
En fait, toute excitation réelle a un début et une fin et est donc
transitoire
. Si sa durée est brève, on parle plutôt de
choc
, mais cette
stratégie reste applicable. Si, au contraire, sa durée est longue, sans
être périodique, on parle d’
excitation aléatoire
[4] [7]. Dans le cas
d’un mouvement quasi stationnaire (ne dépendant pas du temps)
et ergodique (non répétitif dans ses réalisations), l’excitation se
caractérise dans le domaine fréquentiel par sa DSP (densité spectrale
de puissance), ou autospectre,
S
xx
(
ω
), que l’on peut définir comme
la moyenne quadratique de
x
(
t
) en fonction de la fréquence. Plu-
sieurs excitations simultanées seront caractérisées par leur matrice
d’auto et interspectres
S
xx
[moyenne des produits
x
i
(
t
)
x
j
(
t
)] et les
réponses y seront données par :
(6)
avec =
H
yx
conjugué,
H
xy
=
H
yx
transposé.
Ces notations matricielles sont explicitées plus loin.
On retiendra que, quelle que soit la nature du mouvement, les
réponses dans le domaine des fréquences se déduisent des excita-
tions par de simples produits matriciels faisant intervenir les fonc-
tions de transfert.
1.1.6 Fonctions de transfert
Introduite au paragraphe 1.1.3, la fonction de transfert est donc
le rapport dans le domaine fréquentiel entre une excitation et une
réponse. À noter que ce n’est pas, comme on pourrait l’envisager
dans certaines circonstances, un rapport entre deux réponses, ce qui
engendrerait des erreurs dans l’utilisation des développements qui
suivent.
Suite aux considérations du paragraphe 1.1.1, les excitations,
comme les réponses, sont de type
force
ou de type
mouvement
. Ce
dernier peut être défini en termes de déplacements
u
, vitesses
ou accélérations
ü
, et la forme
u
(
ω
) e
i
ω
t
dans le domaine fréquentiel
implique les relations :
(7)
leur utilisation étant strictement équivalente.
Par la suite, on considère principalement les
déplacements
.
Suivant le type d’excitation et de réponse considérées, on obtient
les fonctions de transfert du tableau
1
, les dénominations indiquées
étant les plus courantes (éventuellement suivies du qualificatif
dynamique
). (0)
1.2 Techniques d’analyse
1.2.1 Généralités
Afin de développer efficacement la formulation impliquant un cer-
tain formalisme matriciel, on utilise par la suite des notations où les
indices vont jouer un grand rôle : mnémotechnique d’abord (dans
la mesure du possible), évitant ensuite la multiplicité des notations
pour les matrices, et enfin garants de la cohérence des produits
matriciels par enchaînement des indices.
Les relations entre :
— les excitations en forces
F
i
et en déplacements
u
j
d’une part ;
— les réponses en déplacements
u
i
et en forces de réaction
F
j
d’autre part ;
peuvent alors s’écrire dans le domaine fréquentiel :
(8)
Cette relation fait ainsi apparaître les matrices de flexibilité
G
ii
et
de raideur
K
jj
(symétriques par réciprocité), ainsi que les matrices
de transmissibilité en déplacements
T
ij et en forces Tji (avec
par réciprocité), le signe (–) pour les forces venant du fait
que l’on considère ici les réactions, opposées aux forces transmises.
On voit ici la pertinence de la convention sur les indices.
On va maintenant déterminer ces fonctions de transfert en fonction
des propriétés physiques de la structure considérée, pour en déduire
ses réponses à des excitations de nature quelconque (cf. § 1.1.5).
Les principales notations utilisées par la suite sont récapitulées
dans le tableau Notations et symboles placé en tête de cet article.
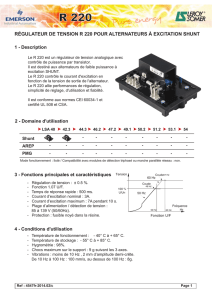
1.2.2 Système à un degré de liberté et modes propres
Le système le plus simple à analyser est le système à un degré
de liberté (1 ddl) c’est-à-dire un système dont l’état est défini par un
seul paramètre. Sa représentation classique est celle de la figure 2,
le paramètre en question étant la position de la masse par rapport
à la position de repos. Il est composé de :
— une masse de valeur m, conférant au système une énergie
cinétique ;
Tableau 1 – Fonctions de transfert
Excitation
Réponse
Fu ü
FTransmissibilité
T
Souplesse
Flexibilité (1) G
Compliance
Mobilité
Admittance
i
ω
G
Accélérance
–
ω
2 G
uRigidité
Raideur (1)
K
Transmissibilité
(1)
Ti
ω
T –
ω
2 T
Impédance
K/i
ω
T/i
ω
Transmissibilité
(1)
Ti
ω
T
üMasse (1)
apparente
M = K/(–
ω
2)T/(–
ω
2)T/i
ω
Transmissibilité
(1)
T
(1) Terme utilisé dans cet article.
Syy
ω
() H*
yx
ω
()
S
xx
ω
()
H
xy
ω
()
=
H*
yx
u
˙
üi
ω
u
˙–
ω
2
u
==
u
˙
u
˙
Par convention
,
X
ij
désigne une matrice de dimension (
n
,
p
)
dont les lignes sont relatives aux
n
ddl i et les colonnes aux
p
ddl j
(sauf indication contraire). Cela implique la relation , et
le fait que
X
ii
soit symétrique, ce qui est licite dans le présent
contexte grâce au principe de réciprocité valable en mécanique
(en excluant les structures en rotation).
Toujours par
convention
, un
indice souligné
a une valeur
fixée : ainsi, désigne la ligne de
X
ij
.
Avec l’
exemple
du pylône cité au
(§ 1.1.1)
, les forces
F
i
seront celles
créées par le vent sur les ddl i, certaines composantes pouvant être
nulles, les déplacements
u
j
seront ceux engendrés par le tremblement
de terre aux points d’ancrage, certains pouvant être nuls. Les réponses
en déplacements internes
u
i
et réactions
F
j
seront obtenues par super-
position des effets des deux sollicitations, comme indiqué par la
relation
(8)
, à partir des fonctions de transfert caractéristiques du
pylône.
Xji Xij
T
=
X
ij
i
Tji Tij
T
=

__________________________________________________________________________________________________________ DYNAMIQUE DES STRUCTURES
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie mécanique
B 5 150
−
5
— un ressort de raideur
k
, conférant au système une énergie
élastique ;
— un amortisseur de constante
c
, permettant au système de dis-
siper de l’énergie.
Ce ddl est de type i (interne). Suite aux considérations du
paragraphe 1.1.1, on peut lui adjoindre un ddl de type j (jonction)
représentant le mouvement imposé à la base. On a alors, comme
indiqué sur la figure
2
, toutes les excitations et réponses possibles
de l’équation (8) où chaque terme est ici un scalaire (i et j de
taille 1). La résolution des équations du mouvement, exposée plus
loin, permet de déterminer sans difficulté les 3 fonctions de trans-
fert impliquées : flexibilité, raideur et transmissibilité.
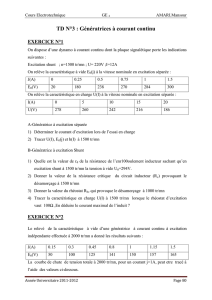
Non seulement le système à 1 ddl est le système le plus simple,
mais on verra par la suite que tout système, aussi complexe soit-il,
peut se ramener à une collection de systèmes à 1 ddl mis en parallèle,
comme schématisé sur la figure
3
. Chacun de ces systèmes repré-
sente en fait un
mode propre
de la structure considérée, dont la
notion a déjà été évoquée au paragraphe 1.1.4. Les fonctions de
transfert de l’équation (8) sont alors obtenues en sommant les contri-
butions de chaque mode
k
(indice
k
fixé) : c’est la technique dite de
superposition modale
:
(9)
Le système à 1 ddl est donc la clé de voûte de l’analyse : la
connaissance de son comportement permet de déterminer celui de
toute structure, continue ou discrétisée. Une structure discrétisée à
N
ddl comportera
N
modes, une structure continue une infinité.
Cependant, en basse fréquence, seuls les premiers seront contri-
butifs, en gros ceux dont la fréquence associée se situe dans la
bande d’excitation : la somme de l’équation (9) ne concernera que
ceux-ci, les autres pouvant être globalement représentés par un
terme résiduel (opération de troncature modale).
Ces modes propres s’obtiennent en résolvant les équations du
mouvement sans excitation, ce qui revient à un problème aux valeurs
propres : les valeurs propres fournissent les fréquences propres, et
les vecteurs propres les formes associées. Dans la mesure où les
modes contributifs sont peu nombreux, l’effort à consentir pour les
calculer sera largement compensé par le gain relatif au calcul des
réponses par l’équation (9) : là réside l’efficacité de cette technique
par rapport à une intégration directe des équations, toujours
possible.
Signalons enfin une autre utilisation du système à 1 ddl : il
constitue un système de référence pour une caractérisation des
excitations par spectres de réponse.
Un
spectre de réponse
se définit comme une certaine réponse
d’un système à 1 ddl à l’excitation considérée en fonction de sa
fréquence propre, d’où la notion de
spectre de choc
ou de
réponse
aléatoire
que l’on introduira plus loin.
La même démarche est utilisée pour définir le dommage par
fatigue d’une excitation.
1.2.3 Analyse et essais
L’
analyse
par superposition modale se fait schématiquement en
trois étapes, comme indiqué sur la figure
4
:
— constitution de matrices représentant les propriétés de masse,
raideur et amortissement de la structure discrétisée ;
— recherche des modes propres par résolution d’un problème
aux valeurs propres ;
— détermination des fonctions de transfert par superposition
modale.
À chaque étape, correspond une technique de sous-structura-
tion, c’est-à-dire de calcul d’une structure à partir de ses sous-
structures :
— à partir des matrices des sous-structures, on obtient les
matrices de la structure par assemblage matriciel ;
— à partir des modes des sous-structures, on obtient les modes
de la structure par manipulation adéquate : c’est ce qui est appelé
la
synthèse modale
;
— à partir des fonctions de transfert des sous-structures, on
obtient les fonctions de transfert de la structure par manipulation
adéquate : c’est ce qui est parfois appelé le
couplage impédanciel
.
ui
ω
()
Fj
ω
()
Gii, k
ω
()
modes k
∑
T
ij, k
ω
()
modes
k
∑
–
T
ji, k
ω
()
modes k
∑
K
jj,
k
ω
()
modes
k
∑
F
i
ω
()
u
j
ω
()
=
Figure 2 – Système à un degré de liberté
Figure 3 – Système complexe
Figure 4 – Analyse et essais
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%