CPGE
/
S
ciences
I
ndustrielles
pour l’
I
ngénieur
C31 Résumé du cours d’Automatique
: C31_Resume cours PCSI .doc-
Page 1 sur 5
Créé le 04/01/2011 –
M Salette
-
Lycée Brizeux
-
Quimper
RESUME DU COURS D'AUTOMATIQUE DE 1
ERE
ANNEE
1- Transformation de Laplace
1-1 Rappel de la définition
Soit f, fonction de la variable réelle t ; la transformée de Laplace F(p) de la fonction f est définie par :
∫
∞−
=
0
.
).(.)( dttfepF
tp
notée
F(p) = L[f(t)] avec p variable réelle ou complexe
1-2 Transformée de Laplace de la dérivée
L[f’(t)] = p.F(p) – f(0
+
)
f(0+) étant la limite à droite de f(t) lorsque t tend vers 0.
Dans le cas où f et ses dérivées sont nulles à l'instant zéro, on obtient :
L[f’(t)] = p.F(p) et L[f’’(t)] = p
2
.F(p)
Nota : L'intérêt de la transformation de Laplace pour la résolution d'équations différentielles est de
remplacer une opération de dérivation par un produit.
1-3 Transformée de Laplace d'une intégrale
[
]
ppF
dyyfL
t
)(
).(
0
=
∫
1-4 Théorème de la valeur initiale, théorème de la valeur finale
))(.(lim))((lim
0
pFptf
pt ∞→→
=
))(.(lim))((lim
0
pFptf
pt →∞→
=
1-5 Théorème du retard
L[f(t-τ)] = e
-pτ
.F(p)
1-6 Les transformées de fonctions à connaître
Fonction f(t) Transf. De Laplace F(p) Fonction f(t) Transf. De Laplace F(p)
Dirac (impulsion) 1
e
-at
ap +
1
Echelon : a.u(t)
p
a
sin(ω.t)
22
ω
ω
+p
Rampe : a.t.u(t)
2
p
a
cos(ω.t)
22
ω
+pp
1-8 Décomposition d'une fraction rationnelle en éléments simples
Soit une fraction rationnelle :
)( )(
)( pD pN
pF =
; La méthode de décomposition est la suivante :
1) factoriser le dénominateur D(p)
pour la suite, prenons en exemple le résultat de factorisation suivant : D(p) = p
2
+(1+T.p)
2) exprimer F(p) en une somme de fraction rationnelles avec des coefficients inconnus ;
(rappel : dans le cas où le pôle est multiple d'ordre n, les puissances successives doivent apparaître dans la
décomposition )
. Avec l'exemple ci dessus, on écrit l'égalité :
).1()( )(
2
pT
C
p
B
p
A
pD pN +
++=
3) déterminer les coefficients inconnus :
Méthode principale : Elle consiste à multiplier les deux membres de l'égalité par le dénominateur de
la fraction dont on recherche le coefficient, puis à annuler le terme qui a été multiplié.
Obtention de B : on multiplie les deux membres par "p
2
" et on pose "p = 0" dans l'égalité.
Obtention de C : on multiplie par (1+Tp) et on pose "p= - 1/T " dans l'égalité.
Obtention de A : voir méthode 2.

CPGE
/
S
ciences
I
ndustrielles
pour l’
I
ngénieur
C31 Résumé du cours d’Automatique
: C31_Resume cours PCSI .doc-
Page 2 sur 5
Créé le 04/01/2011 –
Méthode 2 (dans le cas de pôles de puissance >1) :
On fait tendre p vers l'infini après multiplication par l'un des dénominateurs de la décomposition.
Pour notre exemple, développer :
CTA
pD pNpT
p
++=
+
∞→
0.
)( )()..1(
lim
Méthode de secours
(souvent lourde ; conduit à des équations permettant de calculer les coefficients) :
On réduit le terme de droite au même dénominateur et on identifie ensuite les numérateurs.
Autre méthode de secours (permet de déterminer un des coefficients) :
On donne une valeur numérique à p.
par exemple, B et C étant connus (méthode 1), on prend p=1 pour obtenir une équation avec
l'inconnue C.
2- Schémas fonctionnels
2-1 Fonction de transfert d'un système linéaire
Equation(s) différentielle(s) et schéma décrivant le comportement du système :
)(.
)(
....
)(
.)(.
)(
....
)(
.
)(
.
0101
1
1
1
teb
dt
tde
b
dt
ted
btsa
dt
tds
a
dt
tsd
a
dt
tsd
a
m
m
m
n
n
n
n
n
n
+++=++++
−
−
−
En appliquant la transformation de Laplace aux deux membres de l'équation différentielle, on obtient
la fonction de transfert (ou transmittance) qui est une fraction rationnelle H(p) telle que :
01
1
1
01
1
1
...... ......
)( )(
)( apapapa bpbpbpb
pE pS
pH
n
n
n
n
m
m
m
m
++++
+
+
+
+
==
−
−
−
−
Le degré (n) du dénominateur est appelé "ordre" de la fonction de transfert.
Une autre forme de H(p) est la "forme canonique" :
)..'....'1.( )..'....'1(
.
)( )(
)(
1
11
1
11 n
n
n
n
m
m
m
m
papapap pbpbpb
K
pE pS
pH ++++
+
+
+
+
==
−
−
−
−
α
Le facteur K est appelé "gain statique" du système ou "gain" de la fonction de transfert.
S'il existe une racine nulle d'ordre α de D(p), un terme p
α
apparaît au dénominateur ; la valeur
de α est appelée la "classe" de la fonction de transfert.
)).....().(( )).....().(.(
)( )(
)(
21
21
n
m
pppppp zpzpzpB
pE pS
pH −−−
−
−
−
==
Si on explicite les racines (réelles ou complexes conjuguées) des 2 polynômes constituant le
numérateur et le dénominateur de la fonction de transfert, on a :
Les racines zi du numérateur sont appelées "zéros" de la fonction de transfert ;
Les racines pi du dénominateur sont appelées "pôles" de la fonction de transfert.
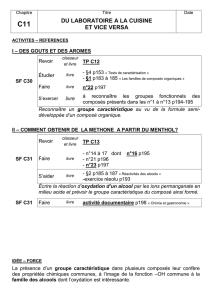
2-2 Systèmes bouclés
Fonctions de transfert :
-de la chaîne directe : H(p)
- de la boucle ouverte : FTBO (p) = H(p).K(p)
- de la boucle fermée :FTBF(p)=
)().(1 )( pKpH pH
+
Schémas à retour unitaire équivalents :
système
e(t)
s(t)
H(p)
E(p)
S(p)
H(p)
K(p)
S(p) E(p)
+
-
H(p).K(p) S(p) E(p)
+
-
1/K(p)
H(p).K(p) S(p)
E(p)
+
-
1/K(p)

CPGE
/
S
ciences
I
ndustrielles
pour l’
I
ngénieur
C31 Résumé du cours d’Automatique
: C31_Resume cours PCSI .doc-
Page 3 sur 5
Créé le 04/01/2011 –
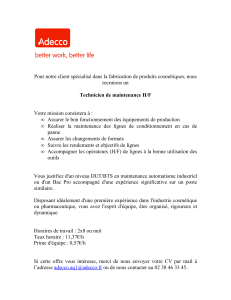
2-3 Association de constituants ; schémas équivalents
Constituants placés en série ;
La fonction de transfert de l’ensemble est égale au
produit des fonctions de transfert de chaque bloc.
)p(H)p(H)p(H)p(H
321
⋅
⋅⋅
⋅⋅
⋅⋅
⋅=
==
=
Constituants placés en parallèle:
La fonction de transfert de l’ensemble est égale à la somm
e
des fonctions de transfert de chaque bloc.
)p(H)p(H)p(H)p(H
321
+
++
++
++
+=
==
=
Déplacements des sommateurs
Démo : On a :
(
)
)p(E)p(E)p(H)p(S
21
+⋅=
ce qui s’écrit encore :
)p(E)p(H)p(E)p(H)p(S
21
+=
Démo : On a :
)p(E)p(E)p(H)p(S
21
+=
ce qui
s’écrit encore :
⋅+⋅= )p(E
)p(H1
)p(E)p(H)p(S
21
Déplacements des points de prélèvement
Démo : On a :
)p(E)p('S =
ce qui s’écrit encore :
)p(E
)p(H1
)p(H)p(E)p('S ⋅⋅==
H
1
(p)
E(p) S(p)
H
2
(p)
H
3
(p)
H(p)
E(p) S(p)
H(p)
E(p) S(p)
H
1
(p)
+
+
S(p)
H
2
(p)
H
3
(p)
+
E(p)
E
2
(p)
H(p)
+
+
E
1
(p) S(p)
H(p) +
+
E
1
(p)
E
2
(p)
S(p)
H(p)
H(p) +
+
E
1
(p)
E
2
(p)
S(p)
H(p)
+
+
E
1
(p) S(p)
1/H(p)
E
2
(p)
S'(p)
H(p)
E(p) S(p)
Point de
prélèvement
H(p)
E(p) S(p)
1/H(p)
S'(p)

CPGE
/
S
ciences
I
ndustrielles
pour l’
I
ngénieur
C31 Résumé du cours d’Automatique
: C31_Resume cours PCSI .doc-
Page 4 sur 5
Créé le 04/01/2011 –
Démo : On a :
)p(E)p(H)p(S)p('S ⋅==
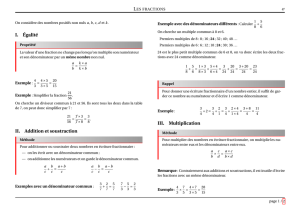
3- La réponse temporelle des systèmes
3-1 Réponse temporelle des systèmes du premier ordre :
pT
K
pH .1
)( +
=
Entrée en échelon : e(t) = E0.u(t) (E(p) = E0/p) Entrée en rampe : e(t) = a.t (pente : a) ; (E(p) = a/p
2
)
T : constante de temps du système
s(t)=K . E
0
. (1 - e
-t/T
) ε
v
est l'écart de traînage : ε
v
= a T (lorsque K=1)
s(t)=K . a. (t - T + T e
-t/T
)
3-2 Réponse temporelle des systèmes du deuxième ordre :
2
2
00
.
12
1
)( pp
K
pH
ωω
ξ
++
= Avec ξ: coefficient d'amortissement ;
ω0 : pulsation propre non amortie.
Si le dénominateur a 2 racines complexes :
Cas : ξ
ξξ
ξ < 1 : il y a des oscillations de période Tp = 2π/ωp
la pulsation propre est :
2
01.
ξωω
−=
p
le dépassement réel : D = s
max
- s
∞
le dépassement pourcent est :
D
1
=
2
1
.
max
ξ
ξπ
−
∞
∞
=
−e
sss
H(p)
E(p) S(p)
S'(p)
Point de
prélèvement
E(p) S(p)
H(p)
H(p) S'(p)

CPGE
/
S
ciences
I
ndustrielles
pour l’
I
ngénieur
C31 Résumé du cours d’Automatique
: C31_Resume cours PCSI .doc-
Page 5 sur 5
Créé le 04/01/2011 –
4- La réponse fréquentielle des systèmes
4-1 Généralités :
soit un système représenté par la fonction de transfert H(p).
On soumet le système à une entrée e(t) = E
0
. sin(ω t)
On observe la sortie : s(t) = S
0
. sin(ω t + ϕ)
On montre que si on remplace p par (j. ω) , on a
ϕ
ω
.
0
0.)( j
e
E
S
jH =
et donc :
le "rapport d'amplitude"
0
0
)()( E
S
jHA ==
ωω
et le déphasage:
))
(
arg(
)
(
ω
ω
ϕ
j
H
=
de la sortie
par rapport à l'entrée
4-2 Système du premier ordre
4-2 Système du deuxième ordre
Si ξ
ξξ
ξ < 0,7 : il y a résonance
(pulsation
2
0
1.
ξωω
−=
r
):
Le coefficient de surtension est
alors:
2
1..2
1
)0(
)(
ξξ
ω
−
== H
jH
Q
r
ou Q
(dB)
= -20 log (
2
1..2
ξξ
−
)
1
/
5
100%