R´
esum´
e du Cours de Mod`
eles de R´
egression
Yves Till´e
10 janvier 2011

1

Chapitre 1
R´egression bivari´ee
1.1 S´erie statistique bivari´ee
On s’int´eresse `a deux variables xet y. Ces deux variables sont mesur´ees sur les nunit´es d’observation.
Pour chaque unit´e, on obtient donc deux mesures. La s´erie statistique est alors une suite de ncouples des
valeurs prises par les deux variables sur chaque individu :
(x1, y1),...,(xi, yi), . . . , (xn, yn).
Chacune des deux variables peut ˆetre soit quantitative, soit qualitative.
1.1.1 Repr´esentation graphique de deux variables
Dans ce cas, chaque couple est compos´e de deux valeurs num´eriques. Un couple de nombres (entiers ou
r´eels) peut toujours ˆetre repr´esent´e comme un point dans un plan
(x1, y1),...,(xi, yi), . . . , (xn, yn).
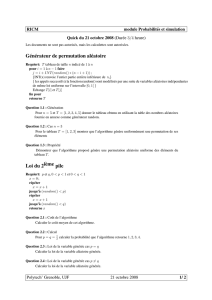
Exemple 1.1 On mesure le poids Yet la taille Xde 20 individus.
Table 1.1 – Taille et poids de 20 individus
yixiyixi
60 155 75 180
61 162 76 175
64 157 78 173
67 170 80 175
68 164 85 179
69 162 90 175
70 169 96 180
70 170 96 185
72 178 98 189
73 173 101 187
1.1.2 Analyse des variables
Les variables xet ypeuvent ˆetre analys´ees s´epar´ement. On peut calculer tous les param`etres dont les
moyennes et les variances :
¯x=1
n
n
i=1
xi, s2
x=1
n
n
i=1
(xi−¯x)2,
2

155 160 165 170 175 180 185 190
60 70 80 90 100
taille
poids
Figure 1.1 – Le nuage de points
¯y=1
n
n
i=1
yi, s2
y=1
n
n
i=1
(yi−¯y)2.
Ces param`etres sont appel´es param`etres marginaux :variances marginales,moyennes marginales,´ecarts-types
marginaux, etc.
1.1.3 Covariance
La covariance est d´efinie
sxy =1
n
n
i=1
(xi−¯x)(yi−¯y).
Remarque 1.1
– La covariance peut prendre des valeurs positives, n´egatives ou nulles.
– Quand xi=yi,pour tout i= 1, . . . n, la covariance est ´egale `a la variance.
– La covariance peut ´egalement s’´ecrire
sxy =1
n
n
i=1
xiyi−¯x¯y.
1.1.4 Corr´elation
Le coefficient de corr´elation est la covariance divis´ee par les deux ´ecart-types marginaux
rxy =sxy
sxsy
.
Le coefficient de corr´elation peut ˆetre interpr´et´e g´eom´etriquement. Consid´erons les deux vecteurs centr´es de
Rn:
˜
x= (x1−¯x, ··· , xi−¯x, ··· , xn−¯x)′
˜
y= (y1−¯y, ··· , yi−¯y, ··· , yn−¯y)′.
Par d´efinition, le cosinus de l’angle entre, ˜
xet ˜
yvaut
cos(˜
x,˜
y) = <˜
x,˜
y>
||˜
x|| × ||˜
y||,
3

o`u <˜
x,˜
y>est le produit scalaire entre les vecteurs ˜
xet ˜
y
<˜
x,˜
y>=
n
i=1
(xi−¯x)(yi−¯y),
et ||˜
x|| (rep. ||˜
y||) est la norme de ˜
x(resp. ˜
y) :
||˜
x|| =
n
i=1
(xi−¯x)2et ||˜
y|| =
n
i=1
(yi−¯y)2.
Le coefficient de corr´elation est donc ´egal au cosinus de l’angle entre les vecteurs ˜
xet ˜
y. Comme un cosinus
est toujours compris dans [−1,1], on obtient que :
−1≤rxy ≤1.(1.1)
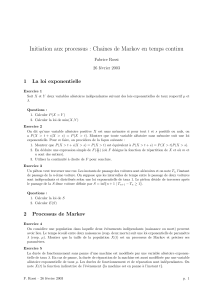
Remarque 1.2 Le coefficient de corr´elation mesure la d´ependance lin´eaire entre deux variables.
– Si le coefficient de corr´elation est positif, les points sont align´es le long d’une droite croissante.
– Si le coefficient de corr´elation est n´egatif, les points sont align´es le long d’une droite d´ecroissante.
– Si le coefficient de corr´elation est nul ou proche de z´ero, il n’y a pas de d´ependance lin´eaire. On peut
cependant avoir une d´ependance non-lin´eaire avec un coefficient de corr´elation nul.
r=1
r=−1
r=0
r>0
r<0
r=0
Figure 1.2 – Exemples de nuages de points et coefficients de corr´elation
Remarque 1.3 La pr´esence d’une corr´elation n’implique pas forc´ement une relation de causalit´e entre les
deux variables.
Le coefficient de d´etermination (appel´e aussi R-deux ou R-carr´e) est le carr´e du coefficient de corr´elation.
r2
xy =s2
xy
s2
xs2
y
.
De l’in´egalit´e (1.1), on obtient directement que
0≤r2
xy ≤1.
4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
1
/
131
100%