OSCILLATEUR LINÉAIRE

1
OSCILLATEUR LINÉAIRE
1) Définition.
Un oscillateur linéaire est un point matériel astreint à se déplacer sur une droite fixe dans (R) galiléen et soumis à
une force attractive vers un point fixe O, d'intensité proportionnelle à la distance entre O et le point matériel.
f= −k
OM, k 0, f = −k x.
f
à t =0 :
OM =x0
i ; d
OM
dt =v0
i .
L'oscillateur n'est pas amorti si
f est la seule force appliquée.
Il est amorti s'il est soumis à une force de frottement
f ', par exemple un frottement fluide
f ' = −h
v , h 0 est
le coefficient de frottement: f ' =−h˙x.
Moment cinétique en O:
LO=
OM∧m
v=
0 ; d
LO
dt =
MO
f
MO
f ' =
0 .
Énergie: on peut considérer la force
f comme une force intérieure au système (O,M) dérivant alors d'une
énergie potentielle Eptelle que
f=
grad Ep; f = −k x = −d Ep
dx ⇒Ep=1
2k x2constante.
En choisissant Ep=0 quand x =0 : Ep=1
2k x2.
Entre les abscisses x1et x2, l 'énergie potentielle varie de ∆Ep=1
2x2
2−x1
2 = −W
f.
Energie mécanique totale : E =EcEp; E =1
2m˙
x21
2k x2.
∆E=W
f ' = −∫t1
t2h
v⋅
vdt = −∫t1
t2h v2dt 0.
L'énergie totale diminue constamment, sauf si l'oscillateur n'est pas amorti (h = 0).
2)Oscillateur non amorti : régime libre.
f=m
a⇒ −k x =m¨
x ou ¨
xω0
2x=0 d 'où x =A cosω0tϕet ˙
x=−Aω0sin ω0tϕ.
x0=Acos ϕ
v0= −Aω0sin ϕ
]
⇒A=
x0
2v0
2
ω0
2; tan ϕ= − v0
ω0x0
.
E =1
2k x21
2m˙x2=1
2k A2cos2ω0tϕ1
2m A2ω0
2sin2ω0tϕ = 1
2k A2=1
2m A2ω0
2.
3)Oscillateur amorti: régime libre .
f
f ' =m
a ; ¨x= − k
m−h
m˙x ; on pose : k
m=ω0
2et h
m=2λ=ω0
Q.
D 'où ¨
x2λ˙
xω0
2x=0 ou ¨
xω0
Q˙
xω0
2x=0.
Equation caractéristique : r22λrω0
2=0 ; ∆'=λ2−ω0
2.
a. ∆'0, λω0: amortissement élevé, régime apériodique .
Les deux racines sont réelles négatives: r1= −λω; r2−λ−ωavec ω=
∆'=
λ2−ω0
2.
x = A eωtB e−ωte−λtavec x 0 = x0=AB et ˙x0 = v0= −λωA−λωB= −λx0ωA−B.
AB=x0
A−B=v0λx0
ω
]
⇒A=1
2
x0v0λx0
ω
; B =1
2
x0−v0λx0
ω
.
x =e−λt
x0
eωte−ωt
2v0λx0
ωeωt−e−ωt
2
=e−λt
x0ch ωtv0λx0
ωsh ωt
.
b. ∆'=0, λ=ω0: régime critique.
Une racine double réelle négative: r =−λ= −ω0; x = A tBe−λt.
x0=B ; v0=A−λB ; A =v0λx0; x =
[
v0λx0tx0
]
e−λt.
M
O
x' x

2
c .∆'0, λω0: amortissement faible, régime pseudo−périodique.
Les deux racines sont complexes conjuguées: r1=−λjω; r2−λ−jωavec ω=
ω0
2−λ2.
x = Ae jωtBe−jωte−λtavec A =1
2
x0v0λx0
jω
; B =1
2
x0−v0λx0
jω
.
x =e−λt
x0
ejωte−jωt
2j v0λx0
ωejωt−e−jωt
2j
=e−λt
x0cosωtv0λx0
ωsin ωt
.
Pseudo−période: T =2π
ω=2π
ω0
2−λ2=T0
1−
λ2
ω0
2
2T0.
Décrément logarithmique δ:xtT
xt=e−λt=e−δ;δ=λT=2πλ
ω0
2−λ2.
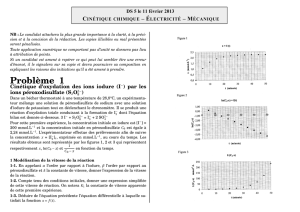
d. Exemple: x0=0 et v00.
Régime apériodique :
A =v0
2ω=−B ; x =v0
2ω
er1t−er2t
.
˙x=A
r1er1t−r2er2t
;˙x=0⇒t=1
r1−r2
ln
r1
r2
=tm.
¨
x=A
r1
2er1t−r2
2er2t
;¨
x=0⇒t=1
r1−r2
ln
r1
r2
2
=2tm.
x=A
r1
3er1t−r2
3er2t
;x=0⇒t=1
r1−r2
ln
r1
r2
3
=3tm.
Régime critique :
A =v0; B =0 ; x =v0t e−λt.
˙x=v01−λte−λt ; ˙x=0⇒t=1
λ.
¨x= −λv02−λte−λt;¨x=0⇒t=2
λ.
x=λ2v03−λte−λt;x=0⇒t=3
λ.
Régime pseudo−périodique :
A =v0
2 j ω= −B. v0
ωe−λt
x =A
e−λjωt−e−λjωt
=v0
ωe−λtsin ωt.
x =0 : sin ωt=0 t =nT
2.
x =±v0
ωe−λtsin ωt= ±1 t =T
4nT
2.
v = ˙x=v0
ωe−λtωcosωt−λsin ωtv0
ω0
ωe−λt
v =v0e−λt
cosωt−λ
ωsin ωt
v =v0
ω0
ωe−λtcosωtϕavec tan ϕ=λ
ω.
v =0 : cosωtϕ = 0 ; t =T
4nT
2−ϕT
2π.
tm
0t
v0
xmx(t)
v(t)
1
λ
0t
v0
v0
v0
e2
λe
tm
t
0
x
T
t
0T
v
v0
tm

3
4)Oscillateur amorti : régime sinusoïdal forcé .
L'oscillateur est soumis à une force excitatrice
f '' =
f0cos ωt⇒
f=
f '
f '' =ma .
D' où x2λxω0
2x=f0
mcos ωt dont la solution s ' écrit x t = x1tx2t.
x1t est la solution générale de l'équation sans second membre et correspond au régime libre déjà étudié.
Pour λt≫1, e−λt≈0 donc x1t ≈ 0.
x2t est une solution particulière de l'équation complète de la forme a cosωtϕ.
Pour λt≫1 et en régime sinusoïdal permanent, la réponse x(t) a même pulsation que la force excitatrice
(oscillations forcées).
Pour déterminer a et ϕ on peut utiliser les grandeurs complexes associées à x et f '':
f ' ' =f0ejωtet xt = a ejωtϕ=X e jωt; a =
∣
X
∣
et ϕ=argX.
L'équation différentielle devient: −ω2X2 j λωXω0
2X=f0
md' où X =f0
m
1
ω0
2−ω22 j λω.
a =
∣
X
∣
=f0
m
1
ω0
2−ω224λ2ω2;ϕ=argω0
2−ω2−2jλω.
a. Etude de l'amplitude de la réponse.
a0 = f0
mω0
2=f0
k; a ω0 = f0
2λmω0
=Qa0; a ∞ = 0.
da
dω= − f0
m2ωω2−ω0
22λ2
[
ω0
2−ω2
24λ2ω2
]
3
2
.
Cette dérivée s'annule pour ω=0 et pour la pulsation Q f0
k
de résonance d ' amplitude ωrtelle que ωr
2=ω0
2−2λ2.λω0
2
ωrn 'existe que si ω0
22λ2soit λω0
2ou Q 1
2.f0
kλ=ω0
2
Amplitude à la résonance =ar=f0
m
1
ω0
4−ωr
4=a0ω0
2
ω0
4−ωr
4.λω0
2
Si λaugmente , ωret ardiminuent et si λ0, ωrω0
et artend∞ (rupture de la liaison élastique entre les points
M et O).
Bande passante: elle est définie par les deux pulsations ω1et ω2telles que a r=a
2 .
Ces deux pulsations n'existent que si ar
2a0soit λ1
2ω0
2−
2=0,383ω0.
Dans ce cas, ω1et ω2sont solutions de ω4−2ωr
2ω22ωr
4−ω0
4=0⇒
[
ω1
2=ωr
2−
ω0
4−ωr
4
ω2
2=ωr
2
ω0
4−ωr
4
On remarque que ωrest la moyenne quadratique de ω1et ω2:ωr
2=1
2
ω1
2ω2
2
.
Si la résonance est très aigüe, λ≪ω0,ωr
4=ω0
4
1−2λ2
ω0
2
2
≈ω0
4
1−4λ2
ω0
2
.
ω0
4−ωr
4≈4λ2ω0
2;ω1
2≈ω0
2−2λ2−2λω0≈ω0
2−2λω0⇒ω1≈ω0−λet de même ω2≈ω0λ.
∆ω=ω2−ω1≈2λ. L'acuité de la résonance est caractérisée par ω0
∆ω ≈ω
2λ=Q.
ω
ar
0
a
ωr ω 0

4
b. Etude de la phase de la réponse.
ϕ=argX = argω0
2−ω2−2 j λω.
ϕ0 = 0 ; ϕω0 =− π
2;ϕ∞ = −π.
dϕ
dω= −2λω2ω0
2
ω2−ω0
224λ2ω2.
dϕ
dω
0
=−2λ
ω0
2= − 1
Qω0
;
dϕ
dω
ω0
=−1
λ=−2Q
ω0
.
Remarques :
•si la courbe a un point d'inflexion, l'abscisse de ce point n'est pas ω0, ni ωrsi elle existemais ωitelle que
ωi=ω0
2
1−
λ2
ω2
2
−1.
•s' il y a résonance : tan ϕr= −ωr
λ; si la résonance est aigüe ωr≈ω0et λ≪ω0: tan ϕr −∞ ;ϕrπ
2.
Dans ce cas : ω1≈ω0−λ; tan ϕ1=−
1−λ
2ω0
≈ −1⇒ϕ1≈ −π
4et de même pour ω2,ϕ2≈ − 3π
4.
c .Etude de la vitesse.
v = ˙x=−aωsin ωtϕ.
amplitude de la vitesse: a ω=f0
m
ω
ω2−ω0
224λ2ω2.
ω0 : a ω0
ω ∞ : a ω0
ω=ω0: a ω=f0
2λm=f0
h.
daω
dω=f0
m
ω0
4−ω4
[
ω2−ω0
224λ2ω2
]
3
2
;
daω
dω
0
=f0
mω0
2=f0
k.
L'amplitude de la vitesse est toujours maximale pour ω=ω0 et on remarque que la dérivée à l'origine est
indépendante de λ toutes les courbes ont même tangente à l'origine.
Bande passante pour la vitesse :
a ω=1
2
f0
2λm⇒2
2λω=
ω2−ω0
2
24λ2ω2.
D' où
ω2−ω0
22λω
ω2−ω0
2−2λω
=0⇒
[
ω1= −λ
λ2ω0
2
ω2=λ
λ2ω0
2;∆ω=ω2−ω1=2λ;ω0
∆ω =Q.
ω0est la moyenne géométrique de ω1et ω2:ω0=
ω1ω2.
5) Notion d' impédance mécanique .
A la vitesse v = ˙x est associé le complexe v = ˙x=jωx d' où V =jωX=f0
m
jω
ω0
2−ω22j λω .
On remarque l'analogie avec l'impédance électrique d'un circuit RLC série avec les correspondances R ↔h ,
L ↔m , C ↔1
k, que l'on peut retrouver à partir des équations différentielles régissant les deux systèmes:
¨qR
L˙
q1
LC q=e
Let ¨xh
m˙xk
mx=f ''
m.
On a aussi les correspondances q ↔x , i ↔v , e ↔f ''.
Cette analogie permet de remplacer l'étude d'un oscillateur mécanique par celle d'un circuit électrique dont les
grandeurs sont plus faciles à mesurer ou modifier.
π
0
ϕωoω
2
-π
λ faible
λ élevé
ω
aω
f0
h
f0
mω0
0
λ faible
λ élevé
ω0

5
6) Étude de l 'énergie .
a. Oscillateur libre non amorti.
L'énergie mécanique totale est constante: E =1
2m˙
x21
2k x2=1
2k A2avec k =mω0
2.
Energie cinétique moyenne:
Ec=1
T∫0
TEcdt =1
T∫0
T1
2mA2ω0
2sin2ω0tϕdt =1
4mA2ω0
2=1
2E.
Energie potentielle moyenne:
Ep=1
T∫0
TEpdt =1
T∫0
T1
2kA2cos2ω0tϕdt =1
4kA2=1
2E.
En moyenne, il y a équipartition de l'énergie totale entre les deux formes d'énergie.
Pour une molécule diatomique vibrant le long de son axe, on doit attribuer 1
2kBT à chaque forme
2 degrés de liberté, soit kBT pour l 'énergie de vibration kB=constante de Boltzmann .
b. Oscillateur libre amorti .
L 'énergie initiale E0disparaît puisque x 0 et v 0 quand t ∞ .
∆E= −E0=W
f ' = −∫0
∞hv2dt 0.
Cette énergie est dissipée sous forme de chaleur reçue par le milieu extérieur.
c .Oscillateur forcé en régime permanent .
E =1
2m˙
x21
2k x2avec k =mω0
2, x =a cosωtϕet ˙
x=−aωsin ωtϕ.
L'énergie totale est périodique, de période T
2, de valeur moyenne
E=1
4ma2ω2ω0
2.
Toute l'énergie fournie par la force excitatrice
f '' au cours d'une période T sert à compenser l'énergie perdue
par frottement: ∫0
T
f ''⋅
v dt∫0
T
f '⋅
v dt =0.
−∫0
Tf0cosωt a ωsin ωtϕdt−∫0
Tha2ω2sin2ωtϕdt =0.
−f0∫0
T1
2
[
sin ϕsin 2ωtϕ
]
dt =ha ω∫0
Tsin2ωtϕdt ⇒sin ϕ= −h a ω
f0
.
1
/
5
100%