TD B3 - Correction 4 - Analyse qualitative du phénomène d

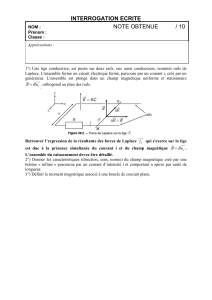
UAB = 0
−→
v A B UAB
−→
B
φ
t6= 0
−→
A−→
uz
−→
Em=−∂−→
A
∂t −→
uz−→
B
−→
A−→
B=−→−→
A

Q=Z∞
0
I(t)t=aire sous la courbe '30 carreaux
100.10−6×20.103= 2 Q= 60
Imoy =Q
T=60
10−3= 6.104
U=Eh = 5.106Eeclair =
1
2Cu2=1
2QU = 1,5×1081 = 3,6×106Eeclair = 41
D'1
c'
3.108−1
τ'10−3
T¿τ
T'D
c'3,3µs ¿τ= 1000 µ
−→
B=µ0I
2πr −→
uθ
−→
BCS
Φ = RR−→
B·−→
S
e
e=−Φ
t=−ZZ ∂−→
B
∂t ·−→
S
e
I
t
I(t) 0 100 µ
700 µ
1/r

−→
FLaplace =Ztige
i−→
`∧−→
B=−I`(x)B0cos α−→
ux−I`(x)B0sin α−→
uz
`(x)=2xtan θ
x−→
uz
m−→
v
dt =−→
P+−→
RN+−→
FLaplace
−→
RN
x
m¨x=mg sin α−2Ix tan θB0cos α
¨x+ω2
0x=gsinα
ω02=2Itan θB0cos α
m
x=gsin α
ω02(1 −cos ω0t)
ω0
x
FLaplace =I`B0= 1 ×5.10−2×0,1 = 5.10−3
∆m=FLaplace
g= 5.10−4

−→
B−→
B=µ0n i(t)−→
uz
−→
B
θ
z−→
E θ
z
M r
−→
uz−→
ur−→
E−→
uθ
−→
E=Eθ(r, t)−→
uθ
−→
E r r < a
S
IC
−→
E·−→
`=ZZS
−→−→
E·−→
S=−ZZS
∂−→
B
∂t ·−→
S=−Φ
t
C
IC
−→
E·−→
`= 2πEθ(r)−Φ
t=−πr2B
t=πr2µ0ni0sin ωt
−→
E=rµ0ni0
2sin(ωt)−→
uθ
−→
j=γ−→
E=γrµ0ni0
2sin(ωt)−→
uθ
hPLori=ZZZcylindre
−→
j·−→
E τ =ZZZ γE2τ=ZZZ γÃωµ0ni0r
2!2
hsin2ωtir r θ z

hPLori=π
16 (µ0ni0)2γ ω2b4L
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%