la chaine d`energie

Page 1/7
LA CHAINE D’ENERGIE
Transmettre
COURS
TD
Hallaoua
ASPECT PHYSIQUE
2ème STM
DYNAMIQUE
1. Principe de conservation de masse :
Un ensemble matériel E vérifie le principe de conservation de masse, si tout sous-ensemble matériel ( e ) de
l’ensemble matériel E a une masse m(e) constante au cours du temps, soit
( ) ( ), te
m(e) =Ce E t
2. Torseur cinétique :
Soit un ensemble matériel (E) de masse m, de centre d’inertie G, en mvt par rapport à un repère R.
Définition : Le torseur cinétique de l’ensemble matériel E dans son mvt par rapport au repère R est, en un
point A quelconque, le torseur suivant :
( / )
( / )
( / )
PR
PE
ER
PR
PE
A
V dm
CAP V dm
Autre expression de la résultante cinétique :
Soit o l’origine du repère R. la position du centre d’inertie G de l’ensemble matériel (E) est donnée par la relation :
.
PE
mOG OPdm
Dérivons les deux membres de cette égalité par rapport à t, dans R
.
PE R
R
dd
mOG OPdm
dt dt
Compte tenu du principe de conservation de la masse on peut :
.
PE
RR
dd
m OG OP dm
dt dt
Soit :
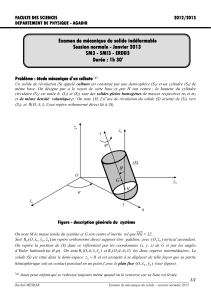
AGIR
Chaîne d’information
Chaîne d’énergie
ACQUERIR
TRAITER
COMMUNIQUER
ALIMENTER
DISTRIBUER
CONVERTIR
TRANSMETTRE
Fonction
étudiée

Page 2/7
( / ) ( / )
G R P R
PE
mV V dm
Et
/
( / )
APR
PR
E R AP V dm
Le torseur cinétique s’écrit donc
( / )
( / ) /
GR
ER A E R
A
mV
C
( / )
AER
est le moment cinétique au point A du torseur
( / )ER
C
.
Remarque : si on suppose que la masse de l’ensemble matériel ( E ) concentrée en son centre d’inertie G, le
torseur cinétique s’écrit en G :
( / )
( / ) 0
GR
ER
G
mV
C
Cette hypothèse simplificatrice est acceptable ou non suivant la nature du mvt de (E).
Exemple : une bille en mvt de chute libre sera modélisée comme un point matériel, ce qui est exclu lors pour l’étude
de son roulement sans glissement sur un plan incliné.
3. Torseur dynamique :
Définition :
Le torseur dynamique de l’ensemble matériel (E) dans son mvt par rapport au repère R est, en un point quelconque, le
torseur suivant :
( / )
( / )
( / )
PR
PE
ER
PR
PE
A
dm
DAP dm
Autre expression de la résultante dynamique :
( / ) ( / )
G R P R
PE
mV V dm
Dérivons les deux
membres de cette
égalité par rapport à t,
dans R
Compte tenu du principe de conservation de la masse on peut :
( / ) ( / )G R G R
PE
RR
dd
m V V dm
dt dt
Soit
( / ) ( / )
G R P R
PE
m dm
Le torseur dynamique s’écrit donc :
( / ) ( / ) .
G R G R
PE R
R
dd
mV V dm
dt dt

Page 3/7
( / )
( / ) ( / )
GR
ER
A
A
m
DER
/:
ER
m
résultante dynamique
( / )
AER
: moment dynamique
Remarque : si on suppose que la masse de l’ensemble matériel ( E ) concentrée en son centre d’inertie G, le
torseur dynamique s’écrit en G :
( / )
( / ) 0
GR
ER
G
m
D
/ / /B E R A E R G R
m AB
4. La relation entre le moment dynamique et le moment cinétique de l’ensemble
matériel (E) :
/ / / /A E R A E R A R G R
R
dmV V
dt
REMARQUE :
cette relation est valable pour un point A et un ensemble matériel (E) quelconques. Par
conséquent le vecteur vitesse
/AR
V
est uniquement égal à
R
dOA
dt
.
On distingue deux cas particuliers où le produit vectoriel est nul.
Premier cas : A est fixe dans R :
//A E R A E R R
d
dt
Deuxième cas : A est confondu avec G :
//G E R G E R R
d
dt
5. L’énergie cinétique Ek ou T:
Définition : l’énergie cinétique de l’ensemble matériel (E) dans son mvt par rapport au repère R est le scalaire positif
suivant :
2
/ / /
1
2
k E R E R P R
PE
E T V dm
6. Moment d’inertie d’un solide par rapport à un axe:

Page 4/7
Soient un
repère
, , , et un axe o, iR O x y z
,
d’origine O et de vecteur unitaire
i
. Posons
i x y z
.
Soit (S) un solide de masse m. notons P un
point quelconque de (S) et H la projection
orthogonale de P sur Δ. Posons :
OP xx yy zz
Définition : le moment d’inertie du solide (S) par rapport à l’axe Δ est le scalaire positif suivant :
2
/SPS
J PH dm
Calcul de J(S/Δ) :
Pour calculer ce moment d’inertie remarquons que :
sin( , )i OP i OP i OP
Comme
i
est un vecteur unitaire, et que dans le triangle rectangle OPH :
sin( , )PH OP i OP
Alors
PH i OP
Déterminons dans la base de R les composantes du vecteur
i OP
, en utilisant une notation classique.
x z y
i OP y x z
z y x
Alors
22 2 2
PH z y x z y x
Soit
22 2 2 2 2 2 2 2 2 2 2 2PH y z z x x y yz zx xy
Par conséquent, le moment d’inertie de (S) par rapport à l’axe Δ s’écrit, en remarquant que α, β, γ sont indépendants
des points P de (S) :
2 2 2 2 2 2 2 2 2
/2
22
SP E P E P E P E
P S P S
J y z dm z x dm x y dm yzdm
zxdm xydm
On pose habituellement :
22
xx PS
A J y z dm
22
yy PS
B J z x dm
22
zz PS
C J x y dm
yz PS
D J yz dm
xz PS
E J zx dm
xy PS
F J xy dm
Alors
2 2 2
/2 2 2
S
J A B C D E F

Page 5/7
,,
,
et sont les moments d'inertie du solide par rapport aux axes x, y, et z et
et sont les produit d'inertie. les axes étant liés au solide, ces grandeurs sont invariables
au cou
xx yy zz
xy yz xz
J J J
J J J
rs du temps.
7. Opérateur d’inertie d’un solide:
Définition : l’opérateur d’inertie d’un solide en un point O, est l’opérateur qui à tout vecteur
u
fait correspondre le
vecteur :
,
oPS
J S u OP u OP dm
Cet opérateur est linéaire, donc représentable par une matrice
matrice ou tenseur d’inertie :
La matrice d’inertie du solide (S) au point O, relativement à la base
,,x y z
, s’obtient en disposant en colonnes les
composantes des vecteurs transformés des vecteurs de base par l’opérateur d’inertie.
,,
O
x y z
A F E
J S F B D
E D C
Propriétés de la matrice d’inertie :
La matrice est symétrique et les moments d’inertie par rapport aux axes x, y, et z apparaissent suivant une diagonale.
Pour une même origine (A, O, etc.), il existe toujours un et un seul système d’axes appelés axes principaux d’inertie,
pour lesquels la matrice est diagonale.
Jxy = Jxz = Jyz = 0
Théorème de Huygens : b étant la distance à l'axe (O) de l'élément dm.
moment d'inertie du corps par rapport à cet axe sera JG :
D'où le théorème de Huygens:
Le moment d'inertie d'un corps par rapport à un axe, est égal au moment d'inertie de ce corps par rapport à un axe parallèle au
précédent et passant par le centre de masse G, augmenté du produit de la masse totale par le carré de la distance entre les 2
axes.
2
OG
J J m
On retiendra les moments d'inertie JG par rapport à l'axe de symétrie principal, de certains corps de masse total m :
Définition
(m)=m(kg)
Cylindre plein
masse m (kg)
Cylindre creux
(couronne)
masse m (kg)
Sphère pleine
masse m (kg)
Tige rectiligne
section négligeable
masse m (kg)
 6
7
6
7
1
/
7
100%