exam1 2013

______________________________________________________________________
Rachid MESRAR Examen de mécanique du solide – session normale 2013
1/2
FACULTE DES SCIENCES
FACULTE DES SCIENCESFACULTE DES SCIENCES
FACULTE DES SCIENCES
2012/2013
2012/20132012/2013
2012/2013
DEPARTEMENT DE PHYSIQUE
DEPARTEMENT DE PHYSIQUE DEPARTEMENT DE PHYSIQUE
DEPARTEMENT DE PHYSIQUE -
--
-
AGADIR
AGADIRAGADIR
AGADIR
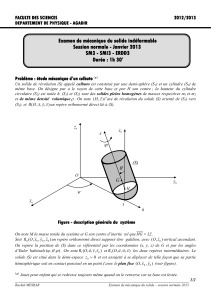
Problème : étude mécanique d’un culbuto
Problème : étude mécanique d’un culbutoProblème : étude mécanique d’un culbuto
Problème : étude mécanique d’un culbuto
(
*
)
Un solide de révolution (S) appelé culbuto est constitué par une demi-sphère (S
1
) et un cylindre (S
2
) de
même base. On désigne par a le rayon de cette base et par H son centre ; la hauteur du cylindre
circulaire (S
2
) est notée h. (S
1
) et (S
2
) sont des solides pleins homogènes de masses respectives m
1
et m
2
et de même densité volumique
ρ
. On note ),( zH
r
l’axe de révolution du solide (S) orienté de (S
1
) vers
(S
2
), et ),,,( zyxHR
r
r
r
un repère orthonormé direct lié à (S).
Figure
FigureFigure
Figure
-
--
- description générale du
description générale du description générale du
description générale du système
systèmesystème
système
On note M la masse totale du système et G son centre d’inertie tel que zLHG
r
=.
Soit ),,,(
0000
zyxOR
r
r
r
un repère orthonormé direct supposé être galiléen, avec ),(
0
zO
r
vertical ascendant.
On repère la position de (S) dans ce référentiel par les coordonnées (x, y, z) de G et par les angles
d’Euler habituels ),,(
ϕ
θ
ψ
. On note ),,,(
01
zvuOR
r
r
r
et
),,,(
2
zwuOR
r
r
r
les deux repères intermédiaires. Le
solide (S) est situé dans le demi-espace 0
0
f
z et est assujetti à se déplacer de telle façon que sa partie
hémisphérique soit en contact ponctuel en un point I avec le plan fixe ),,(
00
yxO
r
r
(voir figure).
(
*
)
Jouet pour enfant qui se redresse toujours même quand on le renverse car sa base est lestée.
I
O
u
r
ϕ
0
z
r
ψ
(S)
z
r
0
z
r
0
y
r
0
x
r
G
θ
H
Examen de mécanique du solide indéformable
Examen de mécanique du solide indéformableExamen de mécanique du solide indéformable
Examen de mécanique du solide indéformable
Session normale
Session normale Session normale
Session normale -
--
- Janvier 2013
Janvier 2013 Janvier 2013
Janvier 2013
SM3
SM3 SM3
SM3 -
--
- SMI3
SMI3 SMI3
SMI3 -
--
- ERDD3
ERDD3 ERDD3
ERDD3
Durée
DuréeDurée
Durée
: 1h 30’
: 1h 30’: 1h 30’
: 1h 30’

______________________________________________________________________
Rachid MESRAR Examen de mécanique du solide – session normale 2013
2/2
PARTIE A
PARTIE A PARTIE A
PARTIE A –
––
– ETUDE CINEM
ETUDE CINEM ETUDE CINEM
ETUDE CINEMATIQUE
ATIQUEATIQUE
ATIQUE
(7,5 points)
(7,5 points)(7,5 points)
(7,5 points)
Q1-
Représenter les figures de calcul et donner l’expression du vecteur instantané de rotation
)/(
0
RSΩ
r
.
Q2- Quelles sont les composantes de
)/(
0
RSΩ
r
dans la base de Résal ),,( zwu
r
r
r
?
Q3- Déterminer la condition géométrique de contact entre (S) et le plan fixe ),,(
00
yxO
r
r
.
Dans la suite du problème, cette condition de maintien de contact sera prise en compte.
Q4- Quel est alors le nombre de degrés de liberté du système ?
Q5- Calculer la vitesse
)/(
0
RGV
r
.
Q6- Calculer l’accélération
)/(
0
RGΓ
r
.
Q7- Déterminer la vitesse de glissement en I de (S) par rapport au plan ),,(
00
yxO
r
r
par ses composantes
dans la première base intermédiaire ),,(
0
zvu
r
r
r
. Commenter le résultat obtenu.
PARTIE B
PARTIE B PARTIE B
PARTIE B -
--
- GEOMETRIE DES MASSES
GEOMETRIE DES MASSES GEOMETRIE DES MASSES
GEOMETRIE DES MASSES
(7.5
(7.5(7.5
(7.5 points)
points) points)
points)
Dans cette partie, toutes les grandeurs vectorielles et matricielles seront exprimées dans la
base ),,( zyx
r
r
r
.
Q8- Déterminer la position du centre d’inertie
1
G
de la demi-sphère (S
1
).
Q9- En déduire la position HG du centre d’inertie G
du système, en exprimant L en fonction de a et h.
Q10- Déterminer la matrice d’inertie en H de la demi-sphère (S
1
).
Q11- Déterminer la matrice d’inertie en H du cylindre (S
2
).
Q12- En déduire la matrice d’inertie en H du système (S).
Q13- Par application du théorème de Huygens généralisé, déterminer la matrice centrale d’inertie du
culbuto.
PARTIE C
PARTIE C PARTIE C
PARTIE C –
––
– ETUDE CINETIQUE
ETUDE CINETIQUE ETUDE CINETIQUE
ETUDE CINETIQUE
(
((
(5
55
5 points)
points) points)
points)
Afin de simplifier l’écriture dans cette partie, on adoptera pour la matrice centrale
d’inertie de (S), la forme de Binet suivante:
),,(
)(
00
00
00
z
G
G
G
S
G
C
A
A
M
r
−−
=
Q14-
Déterminer le torseur cinétique en G de (S) dans son mouvement par rapport à (R
0
).
Q15-
Déterminer le torseur dynamique en G de (S) dans son mouvement par rapport à (R
0
).
Q16-
En utilisant le théorème de Koenig, calculer l’énergie cinétique du système.
1
/
2
100%