142 utilisation de groupes en geometrie

142. UTILISATION DE GROUPES EN GÉOMÉTRIE
Prérequis - Notations
espace affine de dimension finie, son espace vectoriel associé.
Groupe affine , groupe linéaire .
Groupe orthogonal , groupe orthogonal , groupe symétrique .
I. Quelques groupes de
THM-0. L’application : est un morphisme de groupes surjectif.
Preuve :
Morphisme car, si et sont dans :
Surjectif car toute application affine est définie de manière unique par la donnée :
d’un couple de points tels que ;
et par .
En particulier, il existe . Donc à chaque application linéaire , on peut associer une application
affine telle que et de partie linéaire .
DÉF-1. Le noyau de est un sous-groupe distingué de appelé groupe des translations .
Preuve :
Le noyau d’un morphisme est un sous-groupe du groupe de départ. En effet :
car
si et sont dans :
est un sous-groupe distingué de . Or, l’image réciproque par un morphisme de groupes
d’un sous-groupe distingué est un sous-groupe distingué.
COR-1. Soit
et . Alors :
.
Preuve :
Soit :
DÉF-2. L’image réciproque du groupe des homothéties vectorielles par est un sous-
groupe distingué de appelé groupe des homothéties-translations . .

Preuve :
est un sous-groupe de :
si et alors
est distingué dans car, si
et :
Or, l’image réciproque par un morphisme d’un sous-groupe distingué est un sous-groupe distingué.
COR-2. Soit et . Alors : .
Preuve :
Comme est distingué, et pourrait donc être une translation. Cherchons
un éventuel point fixe A :
donc est fixe pour c’est à dire donc .
est donc une homothétie de centre . Cherchons son rapport :
Donc : .
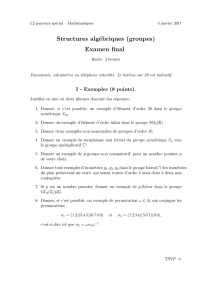
EX-1. Soient et deux triangles de sommets distincts.
Réciproquement :
Preuve sens direct :
Premier cas :
Nommons l’intersection de et et
montrons que . Notons .
Alors car et sont alignés.
De même car et car .
Donc donc sont alignés. Donc les trois droites sont bien concourantes.
𝐵
𝐵
𝐴
𝐶
𝐴
𝐶
𝐼

Deuxième cas : : idem avec
Donc donc
et .
EX-2. Soient et deux droites distinctes. Soit distincts.
Solution dans le cas où et sont sécantes en :
Notons et .
Alors transforme en .
Et transforme en .
Evidemment : est stable par .
est la composée de deux homothéties de même centre et est donc une homothétie de centre .
Deux homothéties de même centre commutent et :
Donc transforme en donc .
Solution dans le cas où et sont parallèles :
On procède de même avec les translations suivantes :
et
Les translations sont commutatives donc et :
Donc transforme en
donc .
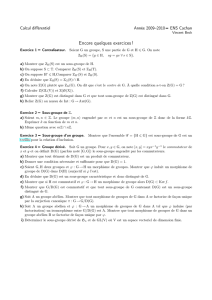
EX-3. Soit un triangle et trois points , et situés respectivement sur , et
mais distincts de , et .
𝐼
𝐴
𝐵
𝐶
𝐶
𝐵
𝐴
𝐴
𝐵
𝐶
𝐶
𝐵
𝐴
𝐵
𝐵
𝐴
𝐶
𝐴
𝐶

Solution Ménélaüs :
Soit l’homothétie de centre qui transforme en .
Soit l’homothétie de centre qui transforme en .
Soit l’homothétie de centre qui transforme en .
Ces homothéties font partie du groupe
donc aussi.
Or, par construction donc :
Remarquons que est la composée d’une homothétie de centre et d’une homothétie
de centre donc :
Donc :
La dernière équivalence découle du morphisme entre et et de la multiplicativité des
rapports dans .
Solution Céva :
Notons :
Supposons :
Supposons concourantes en :
Alors appliquons Ménélaüs à et :
De même pour et :
𝐴
𝐵
𝐶
𝐴
𝐵
𝐶
𝐴
𝐵
𝐶
𝐴
𝐵
𝐶
𝐷
𝐷
𝐷
𝐾
𝐴
𝐵
𝐶
𝐵
𝐴
𝐶
𝐷
𝐷
𝐷

Et on multiplie :
Réciproquement, supposons que
Si alors il n’y a rien à faire.
Sinon, notons l’intersection de et
et l’intersection de et .
, et sont concourantes donc d’après le point précédent :
Donc :
Donc donc et les droites sont effectivement concourantes.
DÉF-3. L’image réciproque du groupe par est un sous-groupe distingué de appelé
groupe des translations et symétries centrales . .
Preuve :
est un sous-groupe de :
et
est distingué dans car commute avec tout. Or, l’image réciproque par un morphisme
de groupes d’un sous-groupe distingué est un sous-groupe distingué.
DÉF-4. L’image réciproque du groupe par est un sous-groupe distingué
de appelé groupe affine positif .
Preuve :
est un sous-groupe de :
car
𝐴
𝐵
𝐶
𝐴
𝐵
𝐶
𝐷
𝐷
𝐷
𝐶
𝐾
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%