Pour que la force musculaire demeure.

Auteur: Anja Schütz, maxon motor ag 1/4
Pour que la force musculaire demeure.
Pour les personnes paraplégiques, la rééducation est souvent un processus de longue haleine; les
méthodes et les techniques utilisées pour optimiser les mesures en fonction du patient revêtent
donc une importance toute particulière. La Haute école spécialisée bernoise a développé un
tricycle équipé d'un dispositif de stimulation électrique, en des années de recherche. Pour se
déplacer, le patient est aidé par un moteur plat maxon.
Faire du vélo couché permet à des patients souffrant de lésions de la moelle épinière de récupérer une
partie de leurs fonctions de mouvement. Les patients disposent ainsi d'une base de modules
d'entraînement musculaire et cardiopulmonaire très pratique, à succès garanti. Les muscles des jambes
paralysés sont réactivés grâce à un programme d'exercices contrôlés et de stimulation électrique
fonctionnelle. Dans la Haute école spécialisée bernoise, des scientifiques et des étudiants de l'Institut de
réhabilitation et technologie de la performance (IRTP) font des recherches pour améliorer les méthodes de
rééducation. Les compétences de l'IRTP sont centrées autour de la réhabilitation cardio-pulmonaire et
neurologique des personnes ayant subi une attaque cérébrale ou des lésions de la colonne vertébrale,
mais également autour des systèmes de signaux en retour, d'automation et de contrôle des appareils
d'entraînement de dernière génération. Méthodes et systèmes sont développés au sein d'une équipe
interdisciplinaire, en collaboration avec des entreprises industrielles et des cliniques de réhabilitation
suisses.
En octobre 2009, Kenneth Hunt, professeur en techniques de réhabilitation, a pris la direction de l'Institut
des systèmes mécatroniques de la Haute école spécialisée bernoise. Il fonda début 2011 le nouvel Institut
de réhabilitation et technologie de la performance. Ecossais d'origine, cet expert en réhabilitation a
participé à la création à Glasgow du «Scottish Centre for Innovation in Spinal Cord Injury» et l'a façonné en
tant que directeur de recherche. Pendant cinq ans, il a également collaboré étroitement avec l'industrie,
dans le département Recherche et Technologie de la société Daimler Benz AG à Berlin.
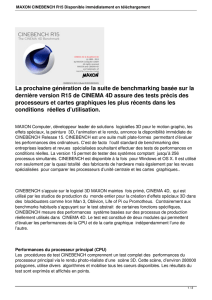
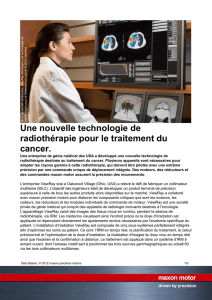
Fig. 1: Le maxon moteur plat maintient les jambes du patient dans le mouvement.
© 2012 IRPT

Rapport d'utilisation en génie médical 8 mars 2013
Auteur: Anja Schütz, maxon motor ag 2/4
Les vélos couchés sont conçus pour les personnes paraplégiques ou ayant subi une attaque cérébrale,
ainsi que pour les enfants touchés par la paralysie cérébrale. «Nous faisons appel à des méthodes et des
technologies issues du sport de haut niveau afin d'améliorer les procédures de réhabilitation des
personnes victimes d'un accident ou d'une maladie», déclare Kenneth Hunt. La SEF fut déjà utilisée dans
la première génération de vélos couchés, qui ne faisait pas encore appel aux moteurs. La nouvelle
génération est équipée d'un moteur électrique qui fournit une puissance s'ajoutant à la SEF. Car la SEF ne
peut à elle seule que fournir une faible puissance de 30 à 40 W, limitant ainsi considérablement la
puissance maximum et la durée d'utilisation de l'appareil.
Composants de l'entraînement pour un soutien
efficace à la force des jambes
Le moteur électrique est utilisé au début de l'aide à
la stimulation. Cela signifie que l'entraînement
maintient les jambes du patient en mouvement.
D'autre part, l'entraînement représente le module
d'entraînement piloté, qui commute sur le mode
frein/générateur lorsque la puissance fournie par le
patient est excessive ou insuffisante, et
inversement. Les moteurs maxon sont intégrés
dans la partie avant du vélo, plus précisément au
niveau du pédalier.
Les exigences auxquelles les moteurs électriques
sont soumis sont dont élevées – d'une part en ce
qui concerne la taille, d'autre part en ce qui
concerne la puissance. Le moteur et le réducteur
doivent tenir entre les pédales pour que le système soit aussi compact que possible. D'après Kenneth
Hunt, les moteurs maxon associés aux réducteurs appropriés répondent parfaitement à ces attentes. Les
moteurs CE plats sans balais maxon représentent l'entraînement idéal dans un grand nombre
d'applications, grâce à leur forme plate. Le moteur plat de 90 watts utilisé dans le vélo couché fournit
également une puissance suffisante pour cette application. L'alimentation électrique du moteur est assurée
par un accu, qui fournit également l'électricité nécessaire au moyeu arrière.
Tout en un, l'entraînement et le frein
Au cours des modules d'entraînement pilotés, le moteur pilote les jambes du patient avant que les muscles
soient stimulés. Plus le patient est alors actif, ou alors plus la force musculaire générée par la stimulation
est importante, moins le moteur doit intervenir. Dès que les muscles génèrent une force suffisante pour
que les jambes soient en mouvement de manière autonome ou puissent agir à l'encontre d'une charge, le
moteur fait office de frein. Un contrôleur à 4 quadrants est donc nécessaire pour assurer la commutation
entre les modes moteur et frein. En mode frein, un chopper de freinage est requis afin d'éliminer l'énergie
produite. Toutes les interactions entre moteur/frein et SEF sont pilotées via un logiciel spécifique qui a été
écrit spécialement par les membres de l'Institut et qui fonctionne sur un ordinateur ou un micro-contrôleur.
Les pédales et la roue motrice du vélo ne sont pas reliées par une chaîne comme le sont les roues
classiques. Les deux éléments ne sont pas accouplés, ce qui rend donc une chaîne inutile. Les pédales et
la roue motrice sont pour ainsi dire «accouplées» par le biais du logiciel de commande. Une grande
souplesse d'utilisation est ainsi réalisée, car la dynamique du déplacement est programmée par le logiciel
et peut donc être adaptée en temps réel. Deux prototypes de vélos couchés ont déjà été construits, à des
fins de recherche: un vélo pour adultes et un vélo pour enfants. Les deux systèmes sont entièrement
opérationnels mais doivent encore être soumis aux études cliniques avec des patients.
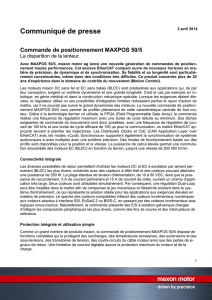
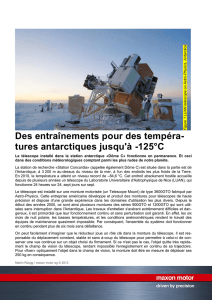
Figure 2: Le prototype de vélo couché pour adultes. L'alimen-
tation électrique du moteur plat et du moyeu de la roue arrière
est assurée par un accumulateur (bloc d'accu rouge). © 2012
IRPT

Rapport d'utilisation en génie médical 8 mars 2013
Auteur: Anja Schütz, maxon motor ag 3/4
Les études cliniques de moyenne importance concernant le système SEF (sans moteur) ont montré
jusqu'alors que la forme physique des patients a été améliorée, la densité osseuse des principaux os des
jambes a augmenté et que la musculature ayant subi la paralysie s'est reconstituée. Suite aux derniers
tests effectués sur la nouvelle génération de vélos couchés, aidés de nos partenaires industriels, celle-ci
va pouvoir être commercialisée. D'autres modifications et améliorations sont prévues sur ces vélos
couchés.
Auteur: Anja Schütz, rédactrice maxon motor ag
Rapport d'utilisation: 6444 signes, 985 mots, 6 illustrations
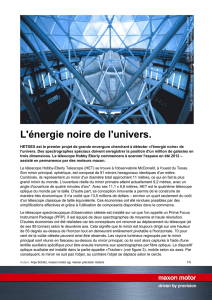
Figure 5: L'alimentation électrique du moteur plat
et du moyeu de la roue arrière est assurée par un
accu. © 2012 IRPT
Figure 4: Le moteur plat d'une puissance de 90 W
équipant le vélo couché délivre une puissance
suffisante pour assurer l'entraînement.
© 2012 IRPT
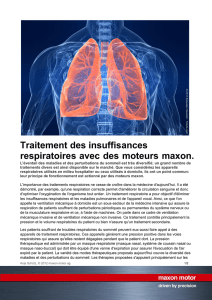
Figure 3: Orthèses, moteur,
réducteur, codeur et capteur
(SRM) sont parfaitement
adaptés les uns aux autres.
© 2012 IRPT

Rapport d'utilisation en génie médical 8 mars 2013
Auteur: Anja Schütz, maxon motor ag 4/4
Vidéo concernant la conduite SEF
Pour de plus amples informations, contactez:
maxon motor ag
Brünigstrasse 220
Postfach 263
CH-6072 Sachseln
Téléphone +41 41 666 15 00
Fax +41 41 666 16 50
Web www.maxonmotor.com
Haute école spécialisée bernoise
Institut de réhabilitation et de technologie de la per-
formance
Prof. Dr. Kenneth Hunt
Pestalozzistrasse 20
CH-3400 Burgdorf
Téléphone +41 34 426 43 69
Web http://irpt.ti.bfh.ch/
Figure 6: Les moteurs plats EC maxon sans balais sont parfai-
tement adaptés à de nombreuses applications grâce à leur
forme plate. © 2012 maxon motor
1
/
4
100%