projet de mecanique du solide

0
CRUTEL Kevin 2014
FERIN--FOUCAL Sarah
LAURENT Hugo
Projet de mécanique du solide
Etude des concentrations de contraintes

1
Sommaire
Introduction
I. Approche théorique
1. Mise en place du problème
2. Application au coin arrondi
3. Conditions aux limites
4. Détermination du coefficient de concentration des contraintes
II. Etude expérimentale
1. La photoélasticimétrie
2. Le dispositif expérimental
3. Etude en lumière polarisée rectilignement
4. La constante de Brewster
5. Les isoclines
6. Les isostatiques
7. Calcul des contraintes
III. Approche numérique
1. Présentation du logiciel
2. Modélisation du problème
3. Visualisation des contraintes
4. Tracé des contraintes selon la largeur de la pièce
5. Coefficient de concentration de contraintes
6. Comparaison des différentes méthodes
Conclusion

2
Introduction
Les différentes structures présentes dans l’industrie présentent des trous,
des entailles et des congés. Ces différents aspects géométriques conduisent à des
affaiblissements de la structure en raison de surcontraintes locales, appelées
concentrations de contrainte. Il est donc bon d’éviter autant que possible le perçage
ou l’usinage de défauts, de particularités ou de parties fonctionnelles de ce type.
Toutefois, la présence de concentrateurs de contraintes est parfois
inévitable. Il est alors nécessaire de connaître le facteur de concentration de
contrainte associé à chaque géométrie afin de dimensionner les structures.
L’étude analytique de répartition de contraintes dans un objet soumis à des
efforts est complexe, en raison de ces particularités. Elle peut néanmoins être
approchée par la mise en place d’un modèle et d’hypothèses simplificatrices.
Il existe également une méthode expérimentale visuelle intéressante : la
photoélasticimétrie.
Enfin, les méthodes numériques – qui sont de plus en plus utilisées dans
l’industrie – permettent d’obtenir de très bons résultats pour des pièces
relativement simples.
A travers ces trois approches, nous avons étudiés les contraintes s’exerçant
sur une éprouvette en traction et présentant deux types de rétrécissement de
section : l’un à angle droit et l’autre en arc de cercle.

3
Objectif
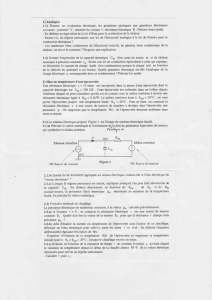
Notre éprouvette présente deux restrictions de section : une brusque
(angles saillants) et une plus légère (angles arrondis) sous forme de congés.
L’objectif de ce projet est d’étudier les concentrations de contraintes dans
cette éprouvette lorsque celle-ci est soumise à un effort de traction et en particulier
au niveau des zones de singularité (les angles droits et arrondis)
Document 1 : Représentation géométrique de l’éprouvette

4
),(
),(
),(
yx
yx
yx
xyxy
yyyy
xxxx
I. Approche théorique
1. Mise en place du problème
Le but de cette partie est de déterminer une expression
théorique de
yy
et
xx
.
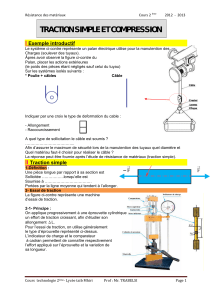
Pour ce faire, on pose dans un premier temps des hypothèses
simplificatrices. D’une part on considère l’étude comme un problème
d’élasticité plane (dans le plans (x,y) comme indiqué sur la figure ci-
contre). Ce qui simplifie le tenseur des contraintes :
avec
D’autre part on néglige les forces volumiques devant la force
de traction appliquée à l’éprouvette. Cette hypothèse simplifie de
nombreuses équations, et en particulier les équations d’équilibre et
de Beltrami : Document 2 :
Représentation de l’éprouvette
Equation d’équilibre :
Equation de Beltrami :
On obtient ainsi à l’aide de ces équations la relation suivante :
000
0
0
yyyx
xyxx
0)(
div
0
0
yx
yx
yyxy
xy
xx
0)(..
11
Trgradgrad
0)()( yyxx
Tr
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1
/
33
100%