Équation différentielle Équation aux différences Fonction transfert

1.8 Représentation des systèmes échantillonnés linéaires invariants
3 moyens de les décrire :
par équation (différentielle et aux différences obtenue par la discrétisation de
l’équation différentielle)
par transformation (Laplace, Z)
par équation d’état (description moderne)
1.8.1 Équation aux différences
a) Définition : (Définition au cours sur tableau)
b) Le diagramme block : Un outil visuel pour représenter une équation aux différences.
c) Résolution des équations aux différences :
i. Méthode classique : Solution particulière
ii. Méthode séquentielle utilisant un calculateur numérique
y(k) = x(k) – x(k-1) – y(k-1) k ≥ 0
x(k) = 1 pour k pair et x(k)= 0 pour k impair
y(0)= 1 - 0 - 0= 1
y(1)=0 - 1 - 1 = -2
y(2)=1 - 0 - (-2) = 3
1.8.2 Transformations
Ä Transformation de Laplace
(Voir vos notes de cours)
Ä Transformation en Z
Théorème du retard en notation complexe
Théorème : à un retard Te correspond une multiplication par e-jωTe
que l’on note z-1
Soit : z = e-jωTe ou, en notation de Laplace, eTe p
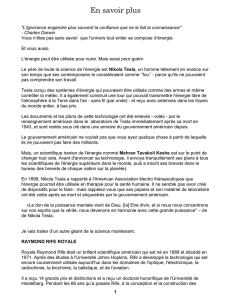
Équation
différentielle Équation aux
différences
Fonction
transfert TC
Fonction
transfert TD
Numérisation
T. Laplace
T. Z

• Transformée en z d'un signal échantillonné
T. de Fourier d'un Dirac retardé :
T. F. d'un signal échantillonné
Définition de la transformée en z :
Application :
Connaissant la fonction de transfert en z d'un système numérique, on peut déterminer sa réponse à
un signal d'entrée échantillonné quelconque par : xe(t) → X(z) → Y(z) → ye(t)
Propriétés (notation simplifiée : y(kTe) = yk )
- Linéarité :
- Théorème du retard :
- Dérivation arrière :
- Intégration simple :
- Intégration, méthode des trapèzes :
- Théorème de la valeur initiale :
- Théorème de la valeur finale :

- Convolution
• Passage : H(jω) ou H(p) → H(z)
- Méthodes de calcul :
- lecture directe d'une table Transformées de Laplace → Transformées en z
- méthode simplifiée : effectuer dans H(p) les changements de variable suivants :
• dérivée (multiplication par p) :
• intégrale (division par p) :
• retard pur :
- méthode des trapèzes (plus précise) :
- Cas d'un procédé réel
Dans la pratique, non seulement le signal est échantillonné, mais il est aussi bloqué. Dans la
fonction de transfert globale, il faut tenir compte de l’existence du " bloqueur d’ordre zéro "
(BOZ). On sait que la transmittance de celui-ci est (on en reparlera dans la description de la
chaîne d’acquisition) :
d’où l’on tire la règle suivante, en notant HB la transformée d’un système échantillonné ET
bloqué, et Z[ ] la transformée en z lue dans la table ou calculée par changement de variable :
• Passage : H(z) → H(jω) ou H(p)
Par changement de variable :
• Passage : H(z) ↔ équation de récurrence
fct. transfert en z :

↔ équation aux différences :
↔ équation de récurrence :
• Passage : équation de récurrence → yk
Immédiat, en calculant pas à pas la suite {yk} à partir de la connaissance :
- de l'équation de récurrence
- de la suite {xk} des échantillons d'entrée
- de la ou des conditions initiales y0, y1, ...
• Passage : H(z) → hk (réponse impulsionnelle discrète du système)
- Par division de polynôme :
- Par transformée en z inverse (lire dans une table)
- Par convolution
• Passage : hk → H(z) : par transformée de Fourier discrète.

Transformées en Z de quelques signaux usuels
Exemple :
Obtenir la transformée en Z du signal discret x(n) = anu(n-n0), ou a est une constante réelle et n0
un entier et déterminer sa région de convergence RDC.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%