C33 - Machine Synchrone (MS)

C33 -
Machine Synchrone (MS)
Moteur synchrone
•
Transmissions mécaniques synchrones
(transmissions de couple) :
- Transmissions par
engrenages ou par courroies
r1
r2
n1
n2
rapport
n1
n2=r2
r1
n2
n1
r1
r2
Si
r1 = r2
, les 2 axes tournent en synchronisme. La transmission du couple est indépendante de la
charge, et le couple moteur est intégralement transmis à celle-ci :
C
1(moteur)
≡ C
2(résistant)
.
- Transmission magnétique par aimants (champ d'excitation magnétique
r
H
)
N
S
S
N
n1
n2
rapport
n1
n2=1
N
S
S
N
θ
r
H
1
r
H
2
vue de dessus
On a toujours : C
1(moteur)
≡ C
2(résistant)
. Mais :
a) Le couple qu'il est possible de transmettre est limité.
b) À vide θ
= 0. Mais en charge l'angle
θ
séparant les deux aimants augmente avec le couple
résistant. On montre que le couple transmissible vaut :
C
θ
0
π
–π
C =
k H
1 H2 sinθ
- à vide (couple résistant nul), θ = 0
- θ
augmente avec la charge
- C est maximum pour θ = π/2
- au-delà, il diminue.
c) Conséquences :
- au démarrage, si la vitesse de rotation
n1
augmente brusquement, il est probable que l'inertie
de la charge empêche une variation instantanée de
n1 = 0 à n1 = n2
. L'angle
θ
variant alors de 0 à 2
π,
la valeur moyenne de sin
θ est nulle, il n'y a pas de couple transmis. Le système ne démarre pas.
- en marche, si le couple résistant augmente,
θ peut dépasser la valeur de π/2. Le système
devient instable, car le couple transmis diminue alors que la charge augmente. La transmission
s'interrompt rapidement. On dit qu'elle "décroche".
- Principe du moteur synchrone
C'est celui d'une transmission magnétique synchrone, avec ses limitations...
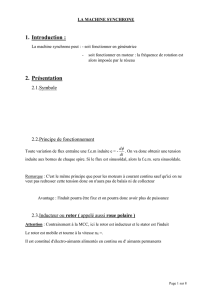
• Constitution
Le stator est un bobinage polyphasé (en général branché en
Y
), qui engendre un champ tournant.
Pour les petites puissances (usuellement < 10 kW), le rotor est à aimants permanents. N'ayant ni
collecteur ni balais, le moteur est appelé
"brushless".
Pour des puissances plus importantes, le rotor est bobiné. Son alimentation en courant continu
G. Pinson - Physique Appliquée Machine synchrone
- C33 /
1
----------------------------------------------------------------------------------------------------------------------------------------------------------------

(connexions du + et du –) peut être assurée par un collecteur à deux bagues (beaucoup plus simple
que celui d'une MCC). Il est aussi possible d'associer sur le même arbre une deuxième MS
fonctionnant en alternateur, à aimants permanents, de puissance inférieure, débitant dans un pont
redresseur tournant qui alimente le rotor de la machine principale. Il n'y a alors ni bagues, ni balais.
Exemple :
moteur "brushless" (schéma simplifié) :
inducteur
aimants
circuit magnétique
codeur
carcasse
arbre
palier
inducteur
resolver ou
codeur optique
aimants
enroulements
statoriques
électronique
de contrôle
•
Caractéristiques
(moteurs brushless) :
- Fortes caractéristiques dynamiques (accélération, couple de démarrage)
- Vitesse élevée (> MCC)
- Durée de vie élevée
- Intégration facile dans les applications d'entraînement et d'asservissement
• Modèle électrique
(cf §C31) :
Vitesse de synchronisme (= vitesse du champ tournant) :
loi des mailles
fcem (loi de Lenz)
Ω
s
=
ω
)
p
rad
/
s ou
n
s
=
f
)
p trs
/
s
(1)
V
=
E
+
R
J
( )
+
j
L
ω
J
(2)
E
=
d
Φ
dt
=
j
ω
Φ
L
R
E
J
V
inducteur
(stator)
x 3
- L'induit (rotor bobiné ou à aimant permanent) n'est pas représenté sur ce schéma.
- L'inducteur (stator) d'une MS triphasée comprend trois enroulements (
⇒
schéma ci-dessus x 3).
- Hypothèses : la machine n'est pas saturée ; les champs magnétiques sont sinusoïdaux.
- Au stator s'appliquent les grandeurs d'enroulement : V
(tension entre phase et neutre) et
J .
- (eq. 1) R
est souvent négligée. A la loi des mailles (écrite en convention récepteur), correspond
un diagramme de Fresnel qui peut prendre deux formes différentes selon la valeur de
E :
J
V
jLωJ
E
ϕ
ψ
J
V
jLωJ
E
ϕ
ψ
machine "sous-excitée" :
E < V
machine "sur-excitée" :
E > V
⇒ ϕ > 0 : MS ≈ récepteur inductif ⇒ ϕ < 0 : MS ≈ récepteur capacitif
G. Pinson - Physique Appliquée Machine synchrone
- C33 /
2
----------------------------------------------------------------------------------------------------------------------------------------------------------------

- (eq. 2) Φ
est le flux du champ engendré par le rotor à travers un enroulement statorique, en
fonctionnement à vide (parfois noté Φv). Comme pour la MCC, l'amplitude de la fem est
proportionnelle à la vitesse de rotation :
E
=
ω
Φ
=
)
p
Ω
s
Φ
=
Ke
Ω
s
, le coefficient de
proportionnalité ne dépendant que des caractéristiques physiques de la machine.
• Conversion electromécanique
- Conversion électromécanique parfaite :
(3) C
m
=
P
em
Ω
s
=
3
VJ
cos
ϕ
Ω
s
- Dans les diagrammes de Fresnel indiqués ci-dessus, on remarque que :
V cos ϕ = E cos ψ. On en
déduit que :
C
m
=
3
)
p
Φ
J
cos
ψ
=
Kc
J
. Comme pour la MCC, le couple est proportionnel au
courant. On remarque que la constante de couple et la constante électrique sont liées par :
Kc = 3Kecosψ.
On montre (voir compléments) que l'angle électrique
ψ
et l'angle géométrique
θ
sont
complémentaires. Donc : cosψ = sinθ ⇒
C
m
=
3
)
p
Φ
J
sin
θ
=
Kc
J
avec
Kc = 3Kesinθ. La
"constante" de couple du MS dépend donc de l'angle géométrique entre les deux champs, donc
du couple résistant. Pour obtenir un fonctionnement analogue à celui d'une MCC (
Kc = cte), il
faut pouvoir contrôler θ
pour asservir le couple : c'est le principe du moteur synchrone auto-
piloté (voir plus bas).
- Conversion électromécanique réelle : bilan des puissances
Il est donné §C31 (conversion electromécanique réelle). Les pertes Joule électriques sont celles
du stator :
PJR = 3RJ2 . Rendement
η
=
P
u
P
a
≈
99%
!
Cas d'un rotor bobiné : il faut ajouter au bilan des pertes la puissance consommée par celui-ci ;
mais il permet de contrôler le facteur de puissance cos
ϕ
en agissant sur le courant d'excitation.
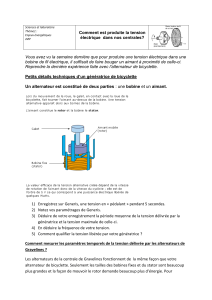
• Fonctionnement statique
La caractéristique statique mécanique
d'un MS (sans électronique de commande) se réduit à un
segment de droite, pour Ω = Ωs = cte.
couple de décrochage
Si la fréquence du réseau est fixe,
un moteur synchrone ne peut
démarrer seul.
Avec un variateur électronique,
démarrage possible à l'intérieur
de la zone de fonctionnement.
zone de fonctionnement
stable (MS brushless)
0
Cm
Ω
Cmax
π
θ
π/2
Ωs
MS seul (sans électronique
de commande)
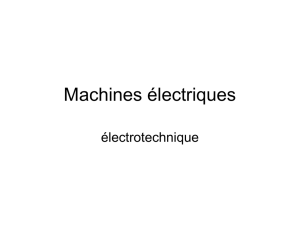
• Fonctionnement dynamique en boucle fermée : moteur synchrone auto-piloté ("brushless")
Il est régi par les équations (1), (2), (3) et
(4)
:
C
m
=
J
d
Ω
dt
+
C
r
Le moteur est contrôlé comme un MCC par une régulation cascade. Un capteur de courant
permet de générer les ordres de commutation d'un onduleur qui alimente le stator à tension
V et
fréquence
f
variables (boucle de régulation interne).
Un capteur de position calé mécaniquement sur le rotor permet de mesurer l'angle
θ, c'est-à-dire
la position angulaire du rotor par rapport au champ statorique. Après multiplication, cela permet de
contrôler le couple, puisque celui-ci est proportionnel à Jsinθ .
G. Pinson - Physique Appliquée Machine synchrone
- C33 /
3
----------------------------------------------------------------------------------------------------------------------------------------------------------------

Cette machine est équivalente à un MCC car l'ensemble {capteurs + onduleur} joue le rôle d'un
collecteur mécanique. Vu côté électronique, il possède les mêmes équations electromécaniques :
Fem et couple : E = KΩ et Cm = KI
(avec :
I : intensité dans une phase)
Constante de temps mécanique :
τ
m
=
r
I
K
2
(avec :
r : résistance entre 2 phases)
Constante de temps électrique :
τ
e
=
l
r
(avec :
l : inductance entre phase)
Il est donc facile d'adjoindre une régulation de vitesse comme sur un MCC, mais avec une
précision encore améliorée du fait des propriétés du MS.
consigne
vitesse
PI
PI
correcteur
vitesse
correcteur
courant
onduleur
MLI
x 3
uc
J1,2,3
moteur
V1,2,3
mesure courant
capteur de
position
x
y
kxy
multiplieur
sinθ
J/Im
Iref
mesure position rotor
Im
mesure vitesse
θ
Cet ensemble est équivalent à un MCC
MS
k
DT
−
1
tachy
ou
resolver
Ω
MS en fonctionnement réversible - alternateur
- Fem efficace par enroulement statorique, à vide :
Un enroulement a
N
conducteurs, soit
N/2 spires. Soit Φ0
le flux sous un pôle à travers une
spire (⇔ Φ = NΦ0
/2). L'alternateur fournit par enroulement la tension à vide suivante :
E
=
ω
Φ
⇒
E
eff
=
2
π
f
2
N
2
Φ
0
=
2,22
f
N
Φ
0
=
K
app
f
N
Φ
0
En pratique le "coefficient de Kapp" K
app
est propre à
chaque type de machine et vaut entre 2,2 et 2,6.
- Fem en charge :
Il faut tenir compte de R et de L.
L'angle
δ
s'appelle "décalage interne" ou "décalage
électrique". Il est > 0 quand la machine fonctionne en alternateur (< 0 en moteur).
La charge pouvant varier dans des proportions considérables, une régulation de tension est
indispensable, obtenue en agissant sur Φ0
, donc sur le courant d'excitation.
- Bilan des puissances
Puiss méca absorbée
Pertes Joule stator et excitation
Pertes Fer + frottements
Puiss utile
(dites "pertes collectives")
Pa = CmΩs
P
u
=
3
UI
cos
ϕ
P
J
=
P
JS
+
P
JR
=
3
2
RI
2
+
rie
2
Pc = PF +Pf
η= Pu
P
a
G. Pinson - Physique Appliquée Machine synchrone
- C33 /
4
----------------------------------------------------------------------------------------------------------------------------------------------------------------
J
V
jLωJ
E
ϕ
δ
RJ

* * * * * * * * * * * * * * * * * * * *
COMPLEMENTS
* * * * * * * * * * * * * * * * * * * *
• Relation entre l'angle électrique
ψ
et l'angle géométrique
θ
On peut donner d'une démarche rigoureuse de géométrie vectorielle dans l'espace-temps la démonstration simplifiée
suivante :
rotor :
e
(
t
)
=
d
Φ
r
(
t
)
dt
=
r
S d
r
B
r
(
t
)
dt
=
µ
0
µ
r
r
S d
r
H
r
(
t
)
dt
⇒
r
E
⊥
r
H
r
stator :
r
H
s
(
t
)
=
N.
r
j
(
t
)
⇒
r
H
s
/
/
r
J
diagramme vectoriel électrique
diagramme vectoriel géométrique
ψ
θ
r
J
r
E
r
H
s
r
H
r
On en déduit que :
θ
=
ψ
+π
2
⇒
C
m
=
3
)
p
Φ
r
J
cos
ψ
=
3
)
p
Φ
r
J
sin
θ
• Production de l'énergie électrique
NB : alternateur toujours branché en Y
pour sortir le neutre
Types :
Vitesse lente ⇒ grand nombre de pôles Vitesse élevée ⇒ faible nombre de pôles
Rotor à pôles saillants
Rotor à pôles lisses (turbo-alternateur)
Centrales hydrauliques
Centrales thermiques et nucléaires
→ qq 100 MVA → GVA
valeurs normalisées
nb paires pôles p
n (tr/min)
1 3000,0
2 1500,0
3 1000,0
4 750,0
5 600,0
6 500,0
7 428,6
8 375,0
10 300,0
12 250,0
16 187,5
20 150,0
24 125,0
32 93,8
40 75,0
nb paires pôles p n (tr/min)
1 3000
2 1500
rotor refroidi à l'hydrogène
rotor refroidi à l'hydrogène
stator refroidi à l'eau
stator refroidi à l'eau
Exemples
Barrage de Grand Maison (Isère)
Tranche nucléaire 1300 MW
p = 7 p = 2
n = 428,6 tr/min
n = 1500 tr/min
P = 153 MVA
P = 1300 MVA
U = 15,5 kV
U = 20 kV
I = 6333A
η
= 98,5%
P excitation : 323 kW
M = 419 t
M = 755 t
G. Pinson - Physique Appliquée Machine synchrone
- C33 /
5
----------------------------------------------------------------------------------------------------------------------------------------------------------------
1
/
5
100%