FORMULAIRE DE MECANIQUE I-CINEMATIQUE 1-Référentiel

11
FORMULAIRE DE MECANIQUE
__________________________________________________________________________________________
I-CINEMATIQUE
1-Référentiel
Un référentiel R est un objet solide qui sert de référence pour décrire le mouvement d’un système.
Le référentiel le plus courant pour décrire les mouvements dans notre environnement est le référentiel
terrestre également appelé référentiel du laboratoire.
On attache au référentiel R un repère cartésien (Oxyz).
2-Cinématique du point
a-Définitions générales
On considère un point matériel M décrivant une certaine trajectoire par rapport à un référentiel R.
Vecteur position :
OM)t(r =
r
Vecteur vitesse :
dt
rd
)t(v
/M
r
r
=
R
en m.s
-1
Vecteur accélération :
2
2
/M
dt
rd
dt
vd
)t(a
r
r
r==
R
en m.s
-2
b-
Composantes dans la base de projection cartésiennes
zyx
uzuyux)t(r
r
r
r
r
+
+
=
zyx/M
uzuyux)t(v
r
&
r
&
r
&
r
+
+
=
R
zyx/M
uzuyux)t(a
r
&&
r
&&
r
&&
r
+
+
=
R
c-
Composantes dans la base de projection cylindriques
zr
uzur)t(r
r
r
r
+=
zr/M
uzurur)t(v
r
&
r
&
r
&
r
+θ+=
θR
zr
2
/M
uzu)r2r(u)rr()t(a
r
&&
r
&
&
&&
r
&
&&
r
+θ+θ+θ−=
θR
d-
Exemple 1 : mouvement de vecteur accélération constant
a)t(a
/M
r
r
=
R
constant ;
)0(vta)t(v
/M
r
r
r
+=
R
;
)0(rt)0(v
2
t
a)t(r
2
r
r
rr ++=
La trajectoire est une parabole.
x
y
z
M
H
r
z
u
u
u
O
r
z
→
→
→θ
θ
M
O
x
y
z
R

12
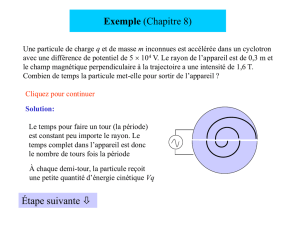
e-Exemple 2 : mouvement circulaire
Prenons l’exemple d’une trajectoire circulaire de rayon R, de centre O, dans le plan z = 0.
Mouvement circulaire uniforme : la vitesse angulaire ω =
θ
&
est constante.
r
uR)t(r
r
r
=
;
θ
θ= uR)t(v
/M
r
&
r
R
;
r
2
/M
uR)t(a
r
&
r
θ−=
R
Mouvement circulaire non uniforme :
r
uR)t(r
r
r
=
;
θ
θ= uR)t(v
/M
r
&
r
R
;
θ
θ+θ−= uRuR)t(a
r
2
/M
r
&&
r
&
r
R
3-Cinématique du solide
Un solide est un système supposé indéformable. On considère deux exemples de mouvements simples :
a-La translation
Un solide est en translation s’il se déplace en gardant une orientation constante au cours du temps.
Autrement dit, il ne tourne pas sur lui-même.
Tous les points du solide ont la même trajectoire et, à chaque instant, ils ont tous la même vitesse.
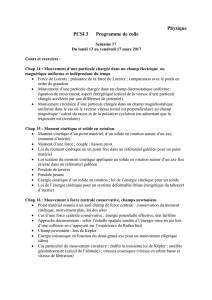
b-La rotation autour d’un axe fixe
Le solide est en rotation autour de l’axe ∆
fixe dans le référentiel R.
On choisit ∆ comme axe Oz du repère
cartésien lié au référentiel.
La rotation du solide est repéré par l’angle
algébrique θ défini entre une direction fixe
dans R (par exemple Ox) et une direction
quelconque liée au solide.
La vitesse angulaire est ω =
θ
&
en rad.s
-1
.
ω > 0 si le solide tourne dans le sens > 0.
ω < 0 si le solide tourne dans le sens < 0.
Un point M quelconque du solide, situé à la
distance r de l’axe ∆, décrit une trajectoire
circulaire de rayon r.
Sa vitesse est :
θ
θ= ur)t(v
/M
r
&
r
R
__________________________________________________________________________________________
R
solide
solide
solide
instant t1
instant t2
instant t3
x
+
θ
y
z
M
axe
∆
solide
O

13
__________________________________________________________________________________________
II-LOI DE LA QUANTITE DE MOUVEMENT
1-Quantité de mouvement
Pour un point matériel M de masse m en mouvement dans le référentiel R :
RR /M/M
vmp
r
r
=
Pour un système (Σ) formé de points M
i
de masse m
i
en mouvement dans le référentiel R :
RR /G/)(
vmp
r
r
=
Σ
où
∑
=ii
mm
est la masse totale de (Σ) et G est le centre d’inertie de (Σ) défini par
∑
=
iii
OMmOGm
2-Référentiel galiléen (première loi de Newton)
Il existe des référentiels, dits
galiléens
, dans lesquels un point matériel qui n’est soumis à aucune force est
animé d’un mouvement de translation rectiligne uniforme.
Tous les référentiels galiléens sont en translation rectiligne uniforme les uns par rapport aux autres.
3-Loi de la quantité de mouvement dans un référentiel galiléen (deuxième loi de Newton)
Pour un point matériel M soumis à une force
F
r
et en mouvement dans un référentiel
galiléen
R
:
F
dt
pd
/M
r
r
=
R
ou encore
Fam
/M
r
r
=
R
Cet équation vectorielle se projète en trois équations scalaires permettent d’étudier la trajectoire du point M.
Pour un système fermé (Σ), par exemple un solide ou un ensemble points, en mouvement dans un référentiel
galiléen
R
soumis à une force extérieure
)(ext
F
Σ→
r
:
)(ext
/)(
F
dt
pd
Σ→
Σ
=r
r
R
ou encore
)(ext/G
Fam
Σ→
=
r
r
R
Cet équation vectorielle se projète en trois équations scalaires permettent d’étudier la trajectoire du centre
d’inertie G du système (Σ).
4-Principe des actions réciproques (troisième loi de Newton)
Soient deux systèmes (Σ
1
) et (Σ
2
) en interaction :
)()()()(
1221
FF
Σ→ΣΣ→Σ
−=
r
r
5-Exemples de mouvements simples
•
Mouvement dans le champ de pesanteur uniforme et sans frottement :
accélération constante égale à
g
r
, trajectoire parabolique.
•
Pendule simple : trajectoire circulaire d’équation 0sin
g=θ+θ l
&&
si θ est petit, les oscillations sont sinusoïdales de pulsation
l
g
=ω
m
x y
z
θ
l

14
6
-Lois de Coulomb du frottement de glissement
(S) est un solide en contact avec un support supposé fixe dans le référentiel d’étude R.
Le support exerce une force sur (S), appelée réaction, que l’on écrit :
NTR
)S(psup
r
r
r
+=
→
•
N
r
est la réaction normale du support.
•
T
r
est la réaction tangentielle du support. Elle traduit le phénomène de
frottement de glissement
.
Les lois de Coulomb (1779) sont d’origine expérimentales et stipulent que :
•
Si (S) ne glisse pas sur le support :
NfT
0
r
r
≤
•
Si (S) glisse sur le support :
NfT
r
r
=
et
T
r
est opposé à la vitesse de glissement
R/)S(
v
r
de (S).
f
0
(resp f) est le coefficient statique (resp cinétique) de frottement de glissement.
f et f
0
sont sans dimension. f
0
est légèrement supérieur à f. Dans les énoncés, ils sont souvent confondus.
f et f
0
de l’ordre de 0,4 pour un contact entre solide en bois, de l’ordre de 0,2 pour un contact entre solide en
métal.
__________________________________________________________________________________________
III-ENERGIE D’UN POINT MATERIEL
1-Puissance et travail d’une force
Soit un point matériel qui se déplace de
dtvrd
/M R
r
r
=
par rapport au référentiel
R
, entre les instants voisins t et t + dt.
Le point est soumis à une force
F
r
.
La
puissance
de la force
F
r
est :
P
=
R/M
v.F
r
r
en watt (W)
Le
travail élémentaire
de la force
F
r
entre t et t + dt est :
dtrd.FW P==δ
r
r
en joule (J)
Le
travail total
de la force
F
r
entre les instants t
1
et t
2
est :
∫ ∫
=δ=
2
1
2
1
t
t
t
t
dtWW P
Le travail et la puissance dépendent du référentiel car la vitesse en dépend.
P > 0 : force motrice P < 0 : force résistante
(S) ne glisse pas sur le support
(S) glisse sur le support
R
M
instant
t

15
2-Loi de l’énergie cinétique et loi de la puissance cinétique dans un référentiel galiléen
L’énergie cinétique du point M mobile dans le référentiel R est :
2/Mc
vm
2
1
E
R
r
=
Loi de l’énergie cinétique dans R galiléen entre les instants t
1
et t
2
: ∆E
c
= W avec ∆E
c
= E
c
(t
2
) – E
c
(t
1
)
Loi de la puissance cinétique dans R galiléen :
P=
dt
dE
c
La loi de la puissance cinétique est à privilégier quand on cherche une équation différentielle du mouvement.
3-Energie potentielle
Une force est dite conservative si son travail élémentaire peut s’écrire sous la forme : δW = -dE
p
où dE
p
= E
p
(t+dt) – E
p
(t).
E
p
est appelée l’énergie potentielle dont dérive la force. Elle est définie à une constante additive près.
Le travail total entre les instants t
1
et t
2
est alors : W = -∆E
p
= E
p
(t
1
) – E
p
(t
2
)
W ne dépend que des états initial et final mais pas du chemin suivi entre les instants t
1
et t
2
.
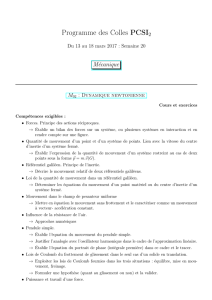
Exemples :
•
Energie potentielle de pesanteur : E
p
= mgz
•
Energie potentielle élastique : E
p
=
2
0
)(k
2
1ll −
•
Energie potentielle gravitationnelle d’une particule de
masse m dans le champ gravitationnel crée par un astre :
r
mM
E
p
G
−=
G = 6,67.10
-11
m.kg
-1
.s
-2
est la constante de la gravitation
z
O
z
m
x
m
O
x
m
O
l0 l
astre de masse M
r
m
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%