Modèle computationnel d’un répertoire de « postures » Belonia Gabalda

© Jean Solé
RAPPORT DE STAGE
Modèle computationnel d’un répertoire de « postures »
Belonia Gabalda
Stage effectué sous la direction d’Olivier Sigaud
au LRP (Laboratoire de Robotique de Paris) et à l’AnimatLab
du 5 février au 25 juin 2007
dans le cadre du Master Recherche en Sciences Cognitives de Paris
Laboratoire de Robotique de Paris
18, route du Panorama - BP 61
92265 Fontenay-aux-Roses Cedex
AnimatLab
Institut des Systèmes Intelligents et Robotique
104 avenue du président Kennedy
75016 Paris

2/42
J’ai effectué mon stage de Master au LRP (Laboratoire de Robotique de Paris) et à
l’AnimatLab (Laboratoire d’Informatique)
Le LRP et l’AnimatLab sont des laboratoires de recherche de l'Université Paris 6.
La recherche développée au LRP est centrée sur la conception et la commande des systèmes
robotiques et micro-robotiques. Elle intéresse plus spécifiquement les applications des divers
domaines de la santé (chirurgie, assistance, biologie). Elle s'adresse également à de
nombreuses applications avancées de la robotique valorisant les mêmes connaissances de
base (systèmes de transport de biens et personnes, manipulations complexes, préhension/
locomotion articulée, etc.) qui constituent des domaines de compétence forts pour les
membres du LRP. Les thèmes de recherche privilégiés par cette formation se focalisent en
particulier sur la modélisation, la conception et la commande des systèmes robotiques
complexes et les systèmes micro-robotiques et les commandes associées, des systèmes de
locomotion à haute mobilité, des interfaces physiques homme/système.
La recherche développée à l'AnimatLab est centrée sur l’approche animat, c'est-à-dire sur
l'étude d'animaux simulés ou de robots, dont les lois de fonctionnement sont inspirées de
celles des animaux, et qui s'avèrent capables de se développer, d'apprendre et d'évoluer.
L'objectif de l'approche animat est de contribuer à l'avancement des sciences cognitives en
recherchant en quoi l'intelligence de l'homme s'explique à partir des comportements
adaptatifs les plus simples hérités de l'animal, dans une perspective à la fois ascendante,
évolutionniste et située. Pour atteindre ces objectifs, l'approche animat postule que les
mécanismes sous-tendant les comportements adaptatifs doivent impérativement être étudiés et
conçus en situation, c'est à dire en tenant compte des buts que l'animat essaie d'atteindre et
des opportunités que l'environnement lui offre pour réaliser ces buts. Concerné par les
neurosciences, les sciences cognitives, l'éthologie, et l'écologie, d'une part, par l'informatique
et la robotique, d'autre part, l'AnimatLab est un lieu de recherches hautement
interdisciplinaire, engagé dans de nombreuses collaborations, tant en France qu'à l'étranger.
[ Extraits des sites internet du LRP et de l’AnimatLab]

3/42
Modèle computationnel d’un répertoire de « postures »
Abstract
Many physiological studies have shown that motor and premotor cortex is organized on the
basis of a repertoire of motor primitives representing arm postures. This repertoire would
emerge from the competition among three parameters, a somatotopic map of the body, a map
of hand location in space and a map representing different ethological categories of
movement. The complex organization of the primary motor and premotor cortex would arise
from these three parameters.
We propose a computational model of this repertoire of postures using a Kohonen network.
The postures are represented as arm angles or spatial locations. The two representations will
be compared. Our model integrates also a robot simulation and several contexts accounting
for the environment. The model allows selection of a goal as a posture of our repertoire,
movement towards that goal and training of our repertoire. Apart from the comparison
between the two different ways of representing a posture, we also studied the result of
different initialisations of our repertoire.
The map gets finally organized to represent the different ethological categories of postures.
The results we obtain show that the final organization of the map does not depend on the type
of representation, but does depend on the initial organization. The learning of a repertoire of
final goal-postures pursued when various contexts appear is well represented in our model.
Résumé
Plusieurs études neurophysiologiques ont montré l’existence d’un répertoire de postures au
sein du cortex, notamment moteur et prémoteur. Ce répertoire serait formé par la compétition
de trois paramètres : une carte somatotopique du corps, une carte des positions de la main
dans l’espace et une carte différenciant plusieurs catégories éthologiques de mouvements.
L’interaction de ces trois paramètres expliquerait l’organisation complexe du cortex moteur
primaire et prémoteur.
Nous proposons un modèle intégrant ce répertoire de postures sous la forme d’une carte de
Kohonen représentant soit des angles articulaires, soit des positions spatiales. Le modèle
comprend également un mannequin virtuel et un environnement constitué de contextes. Le
modèle permet la sélection d’un but représenté par une posture de notre répertoire, le
mouvement vers ce but et l’évolution du contenu du répertoire. Les tests effectués permettent
de comparer deux types de représentation des postures : en angles et en positions, ainsi que
l’effet de deux organisations initiales différentes du répertoire.
La carte s’organise pour représenter chacune des postures éthologiques. Les résultats
montrent que le type de représentation n’influe pas sur l’organisation finale du répertoire,
mais que cette dernière dépend de l’organisation initiale. Le modèle valide la formation du
répertoire par apprentissage des postures vers lesquelles des actions sont dirigées lors de
l’apparition de sources de récompense dans divers contextes.

4/42
SOMMAIRE
I Introduction ____________________________________________________________ 5
II Matériel et méthodes : le modèle ___________________________________________ 9
II.1 Architecture générale_______________________________________________________9
II.1.1 L’environnement ______________________________________________________________10
II.1.2 La simulation : Arboris _________________________________________________________12
II.1.3 Les cartes auto-organisatrices de Kohonen __________________________________________12
II.1.4 La question de la représentation des postures ________________________________________14
II.2 Présentation du modèle ____________________________________________________17
II.3 Algorithme ______________________________________________________________19
II.4 Initialisation et protocole expérimental _______________________________________20
Initialisation de la carte de Kohonen : ________________________________________________20
Optimisation de l’algorithme :______________________________________________________20
Description du protocole expérimental : ______________________________________________20
III Résultats ____________________________________________________________ 23
III.1 Apprentissage des liens ___________________________________________________23
III.2 Apprentissage des postures but : formation de clusters _________________________24
IV Discussion ___________________________________________________________ 29
IV.1 Comparaison des codages en angles ou en positions ____________________________29
IV.2 Comparaison avec Aflalo et Graziano _______________________________________32
V Travaux futurs et perspectives ____________________________________________ 33
Apprentissage de « filtres » ________________________________________________________33
Bruits dans les postures ___________________________________________________________33
Loi de commande dynamique ______________________________________________________33
Séquences de buts _______________________________________________________________34
VI Conclusion ___________________________________________________________ 35
REMERCIEMENTS _____________________________________________________________37
BIBLIOGRAPHIE _______________________________________________________________39

5/42
I Introduction
L’architecture du système neurophysiologique et biomécanique responsable de la commande
motrice humaine et de son apprentissage est d’une grande complexité. Les principes qui
président à la réalisation des mouvements dans des structures nerveuses spécifiques (cortex
moteur, cervelet, ganglions de la base) sont encore mal compris et les modèles sont très
nombreux. Parmi les hypothèses étudiées par les chercheurs, un ensemble de travaux sont
fondés sur l’idée qu’il existe au sein de ce système un répertoire de « postures » qui
pourraient coder pour des « buts » moteurs.
En effet, des études neurophysiologiques chez la grenouille (Giszter et al. 1993) ont montré
qu’en stimulant sa moelle épinière, les membres inférieurs de l’animal se disposaient dans des
configurations spatiales précises indépendamment de leur configuration initiale. Par ailleurs,
des stimulations intracrâniennes chez le singe (Graziano et al. 2002a, 2002b, 2003, 2004)
entraînent également le mouvement de l’animal jusqu’à une posture donnée. Graziano et son
équipe affirment l’existence d’un répertoire de postures dans le cortex moteur primaire et le
cortex prémoteur du singe.
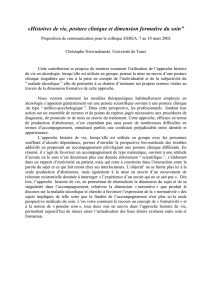
L’aire stimulée dans ces études se situe dans le gyrus précentral. Elle englobe en partie le
cortex moteur primaire (M1), la partie caudale du cortex prémoteur dorsal (PMdc), et le
cortex prémoteur ventral (aires F4 et F5 chez le singe), tel que schématisé sur la figure 1. Des
études de Wise et al. (1997) semblent montrer que la partie rostrale du cortex prémoteur
dorsal (PMdr) est impliquée dans la planification et la sélection de l’action, tandis que la
partie caudale permet l’exécution et la correction du mouvement. Les deux populations de
cellules du cortex prémoteur reçoivent aussi des inputs différents en provenance du cortex
pariétal. Par ailleurs, seules les cellules du PMdr reçoivent de l’information provenant du
cortex préfrontal dorsolatéral. De son côté, l’activité du cortex préfrontal fournit une
information sur les récompenses liées à la sélection d’une action motrice dirigée vers un but
(Matsumoto et al. 2003). Le PMdc, qui projette sur M1 et la moelle épinière, serait plus
directement impliqué dans la préparation et l’exécution du mouvement. Seule une stimulation
de la partie caudale du cortex prémoteur dorsal déclenche un mouvement vers une posture but
(Graziano et al. 2002a, 2002b).
Figure 1. Schémas des aires motrices du cerveau de primate : aire motrice primaire et aire prémotrice et ses
divisions. [ D’après Graziano, 2006]
Ultérieurement, à travers des enregistrements de l’activité neuronale chez le singe lors de
mouvements libres des membres supérieurs, Aflalo et Graziano (2006a) ont montré que les
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%