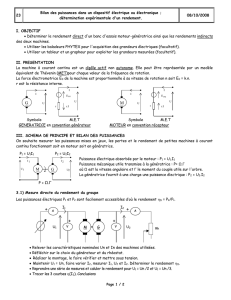
Modélisation des actions mécaniques

T.CHIRLE - 2008
Les Actions
Mécaniques
Définition : Une action mécanique est «invisible»
Il est peu commode de donner une définition non abstraite
d'une action mécanique.
Contrairement à d'autres grandeurs mécaniques, une action
mécanique se définit par ses effets :
● Maintenir un équilibre
●Naissance d'un mouvement
● Modification du mouvement
● Déformation d'un système (gaz, solide déformable,...)
● Echauffement
S2I Lycée Corneille
T.CHIRLE

T.CHIRLE - 2008
Les Actions
Mécaniques
Modélisations :
Une action mécanique peut être défini de différente manières:
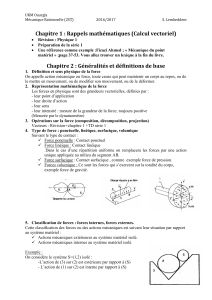
● Modèle locale : on associe un champ de forces linéique,
surfacique, ou volumique
Densité surfacique de force
=
Pression de contact P(M)
Densité volumique de force
=
ρ.g
ρ masse volumique
ACTION de CONTACT ACTION à DISTANCE
S2I Lycée Corneille
T.CHIRLE

T.CHIRLE - 2008
Les Actions
Mécaniques
Modélisations :
Une action mécanique peut être défini de différente manières:
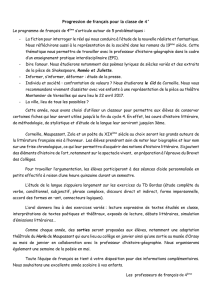
● Modèle globale : on associe un torseur
Résultante des actions
de pression au centre
de la surface de contact
ACTION de CONTACT ACTION à DISTANCE
F
Mo O
Résultante des actions
de pesanteur au centre
de gravité
G
S2I Lycée Corneille
T.CHIRLE

T.CHIRLE - 2008
Les Actions
Mécaniques
Modélisations
Si le modèle locale est adapté à la mécanique des milieux
déformables, ce n'est pas le cas du torseur qu'il faut réserver
à la mécanique des solides.
Même Torseur mais pourtant
des effets différents suivant
l'endroit où s'applique l'action
S2I Lycée Corneille
T.CHIRLE

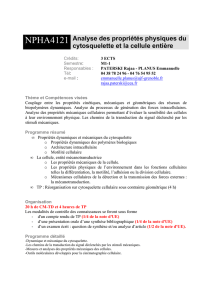
●Le glisseur pour une action mécanique: c'est la
représentation d'une FORCE.
{ }
=→
→
=→
0)cordeskiper,A(M
)cordeskiper(R
A
)cordeskiper(T
)
corde
skiper
(
R
→
La force a pour support l'axe centrale du
glisseur.
La force ne crée aucun moment sur l'axe
centrale. Par contre elle crée un moment
non nul en dehors de l'axe centrale.
A
Les Actions
Mécaniques
Axe centrale du
glisseur
T.CHIRLE - 2008
S2I Lycée Corneille
T.CHIRLE
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
1
/
52
100%