Devoir surveillé N˚3, chapitre 3 : Géométrie plane 12 décembre

1ere S 2 Devoir surveill´e N˚3, chapitre 3 : G´eom´etrie plane 12 d´ecembre 2012
L’ordre des exercices n’a pas d’importance, et surtout, toute trace de recherche, mˆeme infructeuse sera valoris´ee. De
plus, la calculatrice est autoris´ee, mais le d´etail des calculs, et la claret´e des raisonnements sera pris en compte dans
l’´evaluation.
Exercice 1 : QCM (7 points)
Q.C.M. : 1 point par r´eponse correcte, -0.5 si faux et 0 si rien.
1. La norme du vecteur −→
u(3; −4) est ||−→
u|| = 5 ||−→
u|| = 25 ||−→
u|| =−1
2. Les vecteurs −→
u(2√3; 3) et −→
v(6; 3√3) colin´eaires et colin´eaires de mˆeme norme
sont de mˆeme norme
3. Soient A(4; 8) et B(4; 9). Une ´equation x−4 = 0 8x+ 8y+ 9 = 0 x−3y−2=0
cart´esienne de la droite (AB) est
4. Parmi les couples de droites, (d1):2x+ 3y−1 = 0 (d3) : x−y−1 = 0 (d5):7x−1=0
lesquelles sont parall`eles (d2) : −4x+ 6y−3 = 0 (d4) : −2x+ 2y−3 = 0 (d6):7x+y−3 = 0
5. Une ´equation de la droite dirig´ee par −y+ 7x= 2 −2x= 0 −x+y= 0
−→
u(1; 1) et passant par A(1; 1) est
6. Une ´equation de la droite (d)−y+ 7x= 2 −2x= 0 −x+y= 0
parall`ele `a (AB), passant par C
avec A(−1; −3), B(−2; −4) et C(1; 1) est
7. Soit (d) : 3x−2y+ 1 = 0 A(2; 3,5) ∈(d)B(3; 3,5) ∈(d)C(2; 3) ∈(d)
Exercice 2 : (3 points)
Soient −→
u(4; −3), −→
v(t; 2) et −→
w(x+ 1; y−2).
1. D´eterminer tpour que −→
uet −→
vsoient colin´eaires.
2. D´eterminer une relation entre xet ypour que −→
uet −→
wsoient colin´eaires.
Exercice 3 : Un peu de logique (3 points)
1. La propri´et´e suivante est-elle vraie ? ”Si deux vecteurs sont ´egaux alors ils sont colin´eaires”.
2. La r´eciproque est-elle vraie ?
Exercice 4 : Choisir un rep`ere...(3 points)
Dans un triangle ABC, les points A0,B0et C0sont les milieux respectifs des segments [BC], [AC] et [AB]. Mest le
milieu du segment [BC0] et Lest le sym´etrique du point A0par rapport `a B.
1. Dans le rep`ere (B, C, A), d´eterminer les coordonn´ees des points L,Met B0.
2. Montrer que les points L,Met B0sont align´es.
Exercice 5 :(4 points)
Soit ABC un triangle. On d´efinit les points M,Net Ppar : −−→
AM =2
5−−→
AB,−−→
NA −2−−→
CN =−→
0 et −−→
P C =−1
2−−→
BC.
1. A l’aide de la relation de Chasles, exprimer le vecteur −−→
AN en fonction de −→
AC.
2. Montrer que −−→
MN =−2
5−−→
AB +2
3−→
AC et −−→
MP =−9
10 −−→
AB +3
2−→
AC .
3. En d´eduire que les points M,Net Psont align´es.
1

1ere S 2 Devoir surveill´e N˚3, chapitre 3 : G´eom´etrie plane 12 d´ecembre 2012
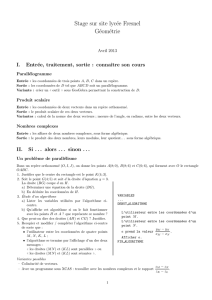
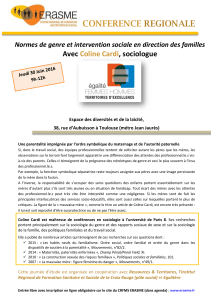
Exercice 6 : La droite de Newton (Non not´e)
Pr´esentation du probl`eme :
Soit ABC un triangle. Consid´erons une droite (d) coupant (AB) en D, (AC) en Eet (BC) en F. Notons ensuite M1
le milieu de [CD], M2le milieu de [AF ] et M3le milieu de [BE].
But : Montrer que M1,M2et M3sont align´es .
Premier cas : (d) passe par un des sommets du triangle.
Sans perte de g´en´eralit´e, supposons que la droite (d) passe par le point A.
1. Que peut-on dire des points A,Det E?
2. Montrer que les points M1,M2et M3sont align´es.
Deuxi`eme cas : (d) ne passe pas par un des sommets du triangle (illustration ci-dessus)
Dans ce cas, (d) est dite ˆetre une droite m´en´elienne du triangle ABC.
On se place dans le rep`ere (A, B, C).
3. D´eterminer une ´equation de la droite (BC).
4.a Justifier l’existence de deux r´eels aet btels que −−→
AD =a−−→
AB et −→
AE =b−→
AC.
4.b Donner les coordonn´ees de Det Een fonction de aet b.
4.c D´emontrer que la droite (DE) a pour ´equation bx +ay −ab = 0.
4.d Justifier que ane peut pas ˆetre ´egal `a b.
5. D´eduire des questions pr´ec´edentes les coordonn´ees de Fen fonction de aet b.
6. D´eterminer les coordonn´ees des points M1,M2et M3en fonction des param`etres aet b.
7. Justifier que M1,M2et M3appartiennent `a une mˆeme droite. Cette droite est appel´ee droite de Newton.
Pour la culture... : Comme pr´ecis´e dans le deuxi`eme cas, une droite ”traversant” un triangle sans passer par un
sommet est appel´ee une m´en´elienne de ce triangle. Concernant le premier cas, une droite ”traversant” un triangle en
passant par un des sommets est appel´ee une c´evienne de ce triangle (par exemple, les hauteurs, m´edianes, m´ediatrices,
etc... d’un triangle sont des c´eviennes de ce triangle). Ces deux termes provenant de deux math´ematiciens grec et ita-
lien, M´en´ela¨us et Giovanni Ceva. Et tout comme la droite de Newton, il existe le th´eor`eme de M´en´elaus et le th´eor`eme
de C´eva.
2

1ere S 2 Devoir surveill´e N˚3, chapitre 3 : Correction 12 d´ecembre 2012
Exercice 1 :
1. ||−→
u|| =p32+ (−4)2=√25 = 5 .
2. On montre facilement que les vecteurs −→
uet −→
vont des normes diff´erentes. Il reste donc `a v´erifier qu’ils sont co-
lin´eaires : 2√3×3√3−6×3=6×3−6×3 = 0. Les vecteurs −→
uet −→
vsont donc colin´eaires .
3. On peut r´epondre de plusieurs mani`eres. Choisissons de d´eterminer une ´equation cart´esienne de la droite (AB)
connaissant deux points de cette droite, en l’occurence les points Aet B.
M(x, y)∈(AB)⇔−−→
AM(x−4; y−8) et −−→
AB(0; 1) sont colin´eaires ⇔(x−4) ×1−0×(y−8) = 0 ⇔x−4 = 0 .
4. Pour r´epondre `a cette question, on peut regarder les vecteur directeurs de chaque droite. Notons −→
u1,−→
u2,...,−→
u6six
vecteurs directeurs respectifs des droites (d1),...,(d6).
−→
u1(−3,2), −→
u2(−6; −4), −→
u3(1; 1), −→
u4(−2; −2), −→
u5(0; 7) et −→
u6(−1; 7). Le seul couple de vecteurs colin´eaires est le couple
form´e des vecteurs −→
u3et −→
u4.
Ainsi, les droites (d3) et (d4) forment le seul couple de droites parall`eles parmis les trois couples propos´es .
5. Notons (d) la droite passant par le point Aet dirig´ee par le vecteur −→
u.
M(x, y)∈(d)⇔−−→
AM(x−1; y−1) et −→
u(1; 1) sont colin´eaires ⇔(x−1) ×1−1×(y−1) = 0 ⇔x−1−y+ 1 = 0 ⇔
x−y= 0 ⇔ −x+y= 0 .
6. La droite (d) est parall`ele `a la droite (AB), donc le vecteur −−→
AB(1; −1) est un vecteur directeur de cette derni`ere.
De plus, le point C(1; 1) appartient `a cette derni`ere, d’o`u :
M(x, y)∈(d)⇔−−→
CM (x−1; y−1) et −−→
AB(−1; −1) sont colin´eaires ⇔(x−1) ×(−1) −(−1) ×(y−1) = 0 ⇔
−x+1+y−1=0⇔ −x+y= 0 ⇔ −x+y= 0 .
7. Seules les coordonn´ees du point Av´erifient l’´equation de la droite (d). Donc A∈(d) .
Exercice 2 :
1. Les vecteurs −→
u(4; −3) et −→
v(t; 2) sont colin´eaires si et seulement si 4 ×2−t×(−3) = 0 ce qui ´equivaut `a t=−8
3.
2. De la mˆeme fa¸con que pr´ec´edement : −→
uet −→
wsont colin´eaires si et seulement si 4 ×(y−2) −(−3) ×(x+ 1) ce qui
´equivaut `a 4y−8+3x+ 3 = 0 ou encore `a 4y+ 3x−5 = 0 .
Exercice 3 :
1. Soient deux vecteurs −→
u(x;y) et −→
v(x0;y0). Supposons que les vecteurs −→
uet −→
vsoient ´egaux. Alors ils ont les mˆemes
coordonn´ees, c’est `a dire que x=x0et y=y0. Il s’en suit que −→
u(x;y) et −→
v(x0;y0) sont colin´eaires si et seulement si
xy0−x0y= 0 ce qui ´equivaut `a xy −xy
| {z }
=0
= 0 (puisque x=x0et y=y0).
Bilan : On a montr´e que si deux vecteurs sont ´egaux alors ils sont colin´eaires .
2. La r´eciproque de cette proposition est : ”Si deux vecteur sont colin´eaires, alors ils sont ´egaux”. Intuitivement,
cette proposition semble fausse, montrons le alors avec un contre exemple. Soient −→
u(1; 1) et −→
v(2; 2) deux vecteurs
colin´eaires mais n’ayant pas les mˆemes coordonn´ees, autrement dit, −→
uet −→
vne sont pas ´egaux.
Bilan : Nous avons montr´e, par un contre exemple, que la r´eciproque est fausse .
Exercice 4 :
1. Dans le rep`ere (B, C, A) : L(−1
2; 0) , M(0; 1
4) , B0(1
2;1
2) .
2. •Premi`ere ”m´ethode” :
Montrons que les vecteurs −−→
LM et −−→
LB0sont colin´eaires. Dans le rep`ere (B, C, A), on a : −−→
LM(1
2;1
4) et −−→
LB0(1; 1
2). V´erifions
si ces deux vecteurs sont colin´eaires : 1
2×1
2−1
4×1 = 0.
Les vecteurs −−→
LM et −−→
LB0sont colin´eaires, donc les points L,Met B0sont align´es .
•Deuxi`eme ”m´ethode” :
D´eterminons une ´equation de la droite (LM) dans le rep`ere (B, C, A). N(x;y)∈(LM )⇔−−→
NL(x+1
2;y) et −−→
LM(1
2;1
4)
sont colin´eaires ⇔1
4×(x+1
2)−y×1
2= 0 ⇔x
4+1
8−y
2= 0 ⇔2x+ 1 −4y= 0. Puis, v´erifions si le point B0(1
2;1
2)
appartient `a la droite (LM ) : 2 ×1
2+ 1 −4×1
2= 0, donc le point B0appartient `a la droite (LM ).
Les points B0,Let Mappartiennent `a la mˆeme droite, ils sont donc align´es .
3

1ere S 2 Devoir surveill´e N˚3, chapitre 3 : Correction 12 d´ecembre 2012
Exercice 5 :
1. −−→
NA −2−−→
CN =−→
0⇔−−→
NA −2−→
CA −2−−→
AN =−→
0⇔ −3−−→
AN −2−→
CA =−→
0⇔ −3−−→
AN = 2−→
CA ⇔−−→
AN =2−→
CA
−3⇔
−−→
AN =2
3−→
AC .
2. •−−→
AM =2
5−−→
AB ⇔−−→
AN
|{z}
=2
3
−→
AC
+−−→
NM =2
5−−→
AB ⇔2
3−→
AC −2
5−−→
AB =−−→
MN .
•D’une part −−→
P C =−1
2−−→
BC ⇔−−→
P M +−−→
MC =−1
2−−→
BA −1
2−→
AC ⇔ −−−→
MP =−1
2−−→
BA −1
2−→
AC +−−→
CM .
D’autre part, −−→
AM =2
5−−→
AB ⇔−→
AC +−−→
CM =2
5−−→
AB ⇔−−→
CM =2
5−−→
AB +−→
CA.
D’o`u finalement −−−→
MP =1
2−−→
AB +1
2−→
CA+2
5−−→
AB +−→
CA ⇔ −−−→
MP =1
2−−→
AB +1
2−→
CA+2
5−−→
AB +−→
CA ⇔ −−−→
MP =9
10 −−→
AB +3
2−→
CA ⇔
−−→
MP =−9
10 −−→
AB +3
2−→
AC .
3. Il suffit de remarquer que −−→
MP =9
4−−→
MN . Autrement dit, les vecteurs −−→
MP et −−→
MN sont colin´eaires,
donc les points M,Net Psont align´es .
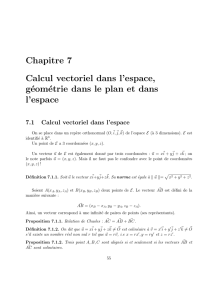
Exercice 6 :
1. Supposons que la droite (d) passe par le point A. Alors, les points A,Det Esont confondus , comme l’illustre la
figure ci-dessous :
2. En utilisant le th´eor`eme des milieux (cas particulier de la r´eciproque du th´eor`eme de Thal`es), puisque M2et M3
sont les milieux des segments [DF ] et [DB], alors les droites (M2M3) et (F B) (donc (F C) puisque les points F,B
et Csont align´es) sont parall`eles. De la mˆeme fa¸con, les droites (M3M1) et (BC) (donc (F C)) sont parall`eles. Ainsi,
les droites (M2M3) et (M3M1) sont toutes les deux parall`eles `a la droite droite (F C). De plus, les droites (M2M3) et
(M3M1) ont en commun le point M3, c’est donc quelle sont confondues.
Bilan : Nous avons montr´e que les droites (M2M3) et (M3M1) sont confondues, donc M1,M2et M3sont align´es.
3. Dans le rep`ere (A, B, C), une ´equation cart´esienne de la droite (BC) est x+y−1 = 0.
4.a Les vecteurs −−→
AB et −→
AC ´etant non colin´eaires, on peut alors ´ecrire les coordonn´ees de n’importe quel vecteur du
plan en fonction des vecteurs −−→
AB et −→
AC, c’est en particulier vrai pour les vecteurs −−→
AD et −→
AE. Ainsi, il existe des r´eels
a,a0,bet b0tels que −−→
AD =a−−→
AB +a0−→
AC et −→
AE =b−−→
AB +b0−→
AC. Or, les points Det Eappartiennent respectivement `a
l’axe des abscisses et des ordonn´ees du rep`ere (A, B, C), donc a0= 0 et b0= 0.
Bilan : On a justifi´e l’existence de deux r´eels aet btels que −−→
AD =a−−→
AB et −→
AE =b−→
AC.
4.b C’est imm´ediat d’apr`es la question pr´ec´edente. Les coordonn´ees dans le rep`ere (A, B, C) sont D(a, 0) et E(0; b) .
4.c M(x;y)∈(DE)⇔−−→
DM(x−a;y) et −−→
ED(a;−b) sont colin´eaires ⇔ −b×(x−a)−y×a= 0 ⇔ −bx +ab −ya = 0 ⇔
bx +ay −ab = 0 .
4.d Dans le rep`ere (A, B, C) on a −−→
AD(a; 0) et −→
AE(0; b) puisque dans le rep`ere (A, B, C) on a A(0; 0), D(a; 0) et E(0; b).
Ensuite, les vecteurs −−→
AD et −→
AE sont colin´eaires si et seulement si a×b−0×0 = 0, c’est `a dire, si et seulement si
ab = 0. Supposons maintenant que a=b, alors a2= 0 donc a= 0. Autrement dit, les coordonn´ees de Ddans le
rep`ere (A, B, C) sont (0; 0) et de mˆeme les coordonn´ees de Esont (0; 0), ce qui implique que les points A,Det Esont
confondus, ce qui est impossible puique la droite (d) ne passe pas par le point A(C’est le ”Premier cas”).
4

1ere S 2 Devoir surveill´e N˚3, chapitre 3 : Correction 12 d´ecembre 2012
Bilan : On a montr´e que a=best impossible, donc a6=b.
5. Notons (x1;x2) les coordonn´ees du point Fdans le rep`ere (A, B, C).Il s’agit alors d’exprimer x1et x2en fonction
de aet b.
D’une part F∈(BC) donc x1+x2−1 = 0. D’autre part F∈(DE), donc bx1+ax2−ab = 0. On peut alors
se ramener `a la r´esolution d’un syst`eme 2 ×2, que l’on notera (S). On a alors, (S) : x1+x2−1=0
bx1+ax2−ab = 0 ⇔
ax1+ax2−a= 0
bx1+ax2−ab = 0 ⇔ax1+ax2−a= 0
ax1+ax2−a−bx1−ax2+ab = 0 ⇔ax1+ax2−a= 0
ax1−a−bx1+ab = 0 ⇔ax1+ax2−a= 0
x1(a−b) = a−ab ⇔
(ax1+ax2−a= 0
x1=a−ab
a−b(car a6=b)⇔(a×a−ab
a−b+ax2=a
x1=a−ab
a−b⇔(a−ab
a−b+x2= 1
x1=a−ab
a−b⇔(x2= 1 −a−ab
a−b
x1=a−ab
a−b⇔(x2=−b+ab
a−b
x1=a−ab
a−b
.
Bilan : On a montr´e que dans le rep`ere (A, B, C) on a F(a−ab
a−b;−b+ab
a−b) .
6. Dans le rep`ere (A, B, C), on a : A(0; 0), C(0; 1), B(1; 0), D(a; 0) et E(0; b) et F(a−ab
a−b;−b+ab
a−b). Ensuite, M1
est le milieu du segment [DC] donc M1(xD+xC
2;yD+yC
2) c’est `a dire M1(a
2;1
2) . De la mˆeme fa¸con, on obtient
M2(a−ab
2(a−b);−b+ab
2(a−b)) et M3(1
2;b
2) .
7. On trouve, apr`es calculs, que −−−−→
M1M2(a−a2
2(a−b);ab−a
2(a−b)) et −−−−→
M1M3(1−a
2;b−1
2), c’est `a dire −−−−→
M1M2=a
b−a−−−−→
M1M3. Autrement
dit, les vecteurs −−−−→
M1M2et−−−−→
M1M3sont colin´eaires.
Bilan : On a montr´e que les vecteurs −−−−→
M1M2et −−−−→
M1M3sont colin´eaires, donc les points M1,M2etM3sont align´es .
5
1
/
5
100%