Equations de conservation

41G
´
en´
eralit´
es
Chapitre 2
Equations de conservation
Les ´
equations de conservation associ´
ees aux lois constitutives sont les outils du
m´
ecanicien des fluides, elles contiennent l’ensemble des connaissances n´
ecessaires
pour reproduire int´
egralement le ph´
enom`
ene observ´
e par la voie de la r´
esolution
ou de la simulation. La mod´
elisation physique qui conduit `
a ce syst`
eme d’´
equations
repr´
esentatives est ainsi la pierre angulaire de toute construction math´
ematique
qui vise `
a appr´
ehender les ´
ecoulements de fluides du point de vue th´
eorique. Ces
´
equations sont ´
etablies sur la base d’hypoth`
eses et de postulats souvent anciens
dont il convient de rappeler le sens et ´
eventuellement d’en discuter le bien fond´
e.
Les diff´
erentes pr´
esentations d’un ouvrage de m´
ecanique des fluides, qu’il soit
organis´
e en ´
equations g´
en´
erales puis en cas particuliers comme ici, ou bien, `
a
l’inverse que les cas simples permettent d’introduire des concepts plus g´
en´
eraux,
doivent permettre au lecteur de comprendre le contexte dans lequel il est plac´
e.
Par exemple un ig´
enieur qui aurait oubli´
e que la loi de Bernouilli n’est applica-
ble que dans des hypoth`
eses tr`
es restrictives pourrait ˆ
etre tent´
e de l’appliquer `
a
tout probl`
eme pos´
e. Il convient donc de bien comprendre que tout probl`
eme doit
faire l’objet d’une analyse objective de tous les ph´
enom`
enes physiques qui lui sont
associ´
es avant toute mod´
elisation.
2.1 Notion de milieu continu
Le concept de milieu continu est attach´
e`
a une perception ”m´
ecanicienne”
de la mati`
ere par comparaison `
a une vision plus physique qui d´
ecrit la nature cor-
pusculaire de la mati`
ere. Chaque grandeur est d´
efinie pour un ensemble suffisant de
particules centr´
ees autour du point P sur lequel est attach´
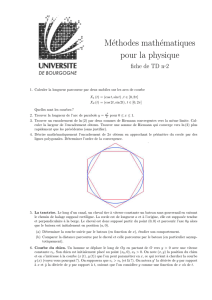
ee cette grandeur (Fig. 2.1).
Consid´
erons un volume de contrˆ
ole
Ω
limit´
e par une surface
Σ
sur laquelle nous
d´
efinissons une normale ext´
erieure n.
Cet ouvert
Ω
contient un fluide : liquide, ou gaz `
a pression suffisante de mani`
ere
que le libre parcours moyen des mol´
ecules soit tr`
es inf´
erieur aux dimensions car-
act´
eristiques du domaine. Cette condition sera implicitement incluse dans le concept
5
J.-P. Caltagirone, Physique des Écoulements Continus,
Mathématiques et Applications 74, DOI: 10.1007/978-3-642-39510-9_2,
ÓSpringer-Verlag Berlin Heidelberg 2013

6 2 Equations de conservation
Fig. 2.1 Milieu form´
e de particules de taille
ε
distantes en moyenne de
δ
consid´
er´
e comme un
milieu continu de volume
Ω
limit´
e par la surface
Σ
munie d’une normale ext´
erieure n
de milieu continu. Elle est d´
efinie par l<< Lo`
ulest le libre parcours moyen des
mol´
ecules et L la dimension caract´
eristique du domaine.
Le volume de contrˆ
ole contient, outre le fluide, des particules solides dispers´
ees
dans le milieu et dont les dimensions sont tr`
es petites devant la distance moyenne
qui les s´
epare
δ
<< l. Cet ensemble de particules solides immobiles introduit une
r´
esistance visqueuse qui peut ˆ
etre caract´
eris´
ee par une ”traˆ
ın´
ee volumique”.
2.2 Cin´
ematique des fluides
2.2.1 D´
eriv´
ee particulaire
Il existe deux m´
ethodes pour d´
ecrire le mouvement d’un syst`
eme mat´
eriel con-
tinu [29]:
•la description Lagrangiennne : on rattache les diff´
erentes grandeurs au point
mat´
eriel
•la m´
ethode Eul´
eriennne : on rattache les diff´
erentes grandeurs au point g´
eom´
etrique.
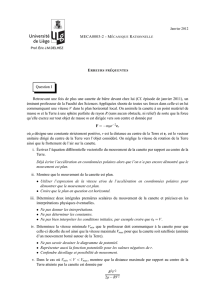
2.2.2 Description Lagrangienne
On se donne les ´
equations param´
etriques de la trajectoire (Fig. 2.2) de l’ensemble
des points mat´
eriels Pdans un rep`
ere cart´
esien. Si (x0
1,x0
2,x0
3)sont les coordonn´
ees
initiales du point Pconsid´
er´
e(
`
a t=0), on suppose connues les relations xi=
xi(x0
1,x0
2,x0
3,t)qui donnent la position du point P`
a l’instant tqui ´
etait initialement
en P
0(x0
1,x0
2,x0
3)
(x0
1,x0
2,x0
3)sont les variables ind´
ependantes de Lagrange
Toute grandeur li´
ee `
a un ´
el´
ement mat´
eriel P du continu peut ˆ
etre ´
etudi´
ee en suiv-
ant sa trajectoire. Elle est alors fonction de (x0
1,x0
2,x0
3,t)
2.2 Cin´
ematique des fluides 7
Fig. 2.2 Trajectoire d’une particule mat´
erielle dans un rep`
ere de coordonn´
ees cat´
esiennes
(x1,x2,x3)
G=G(x0
1,x0
2,x0
3,t)
C’est le cas de
xi=xi(x0
1,x0
2,x0
3,t)position de P
Vi=Vi(x0
1,x0
2,x0
3,t)=dxi
dt =
∂
xi
∂
tvitesse de P
γ
i=
γ
i(x0
1,x0
2,x0
3,t)=d2xi
dt2=
∂
2xi
∂
t2acceleration de P
L’utilisation des variables de Lagrange fait intervenir la position initiale de la par-
ticule dans l’´
etat initial du syst`
eme. C’est la m´
ethode la mieux adapt´
ee `
a l’´
etude des
”solides” d´
eformables pour lesquels on peut d´
efinir un ´
etat initial et suivre facile-
ment la transformation.
Dans les milieux fluides l’´
etat initial n’a aucune importance sur les efforts in-
ternes `
a l’´
etat pr´
esent. La description de Lagrange est mal adapt´
ee `
a l’´
etude du
mouvement des fluides.
2.2.3 Description Eul´
erienne
En un point g´
eom´
etrique donn´
eMon se donne les composantes du vecteur
vitesse Vi=Vi(M,t)et toute grandeur physique attach´
ee au fluide G(M,t).
Soit dans un syst`
eme de coordonn´
ees cart´
esiennes :
Vi=Vi(x1,x2,x3,t)
G=G(x1,x2,x3,t)
(x1,x2,x3,t)sont les variables d’Euler.

6 2 Equations de conservation
Fig. 2.1 Milieu form´
e de particules de taille
ε
distantes en moyenne de
δ
consid´
er´
e comme un
milieu continu de volume
Ω
limit´
e par la surface
Σ
munie d’une normale ext´
erieure n
de milieu continu. Elle est d´
efinie par l<< Lo`
ulest le libre parcours moyen des
mol´
ecules et L la dimension caract´
eristique du domaine.
Le volume de contrˆ
ole contient, outre le fluide, des particules solides dispers´
ees
dans le milieu et dont les dimensions sont tr`
es petites devant la distance moyenne
qui les s´
epare
δ
<< l. Cet ensemble de particules solides immobiles introduit une
r´
esistance visqueuse qui peut ˆ
etre caract´
eris´
ee par une ”traˆ
ın´
ee volumique”.
2.2 Cin´
ematique des fluides
2.2.1 D´
eriv´
ee particulaire
Il existe deux m´
ethodes pour d´
ecrire le mouvement d’un syst`
eme mat´
eriel con-
tinu [29]:
•la description Lagrangiennne : on rattache les diff´
erentes grandeurs au point
mat´
eriel
•la m´
ethode Eul´
eriennne : on rattache les diff´
erentes grandeurs au point g´
eom´
etrique.
2.2.2 Description Lagrangienne
On se donne les ´
equations param´
etriques de la trajectoire (Fig. 2.2) de l’ensemble
des points mat´
eriels Pdans un rep`
ere cart´
esien. Si (x0
1,x0
2,x0
3)sont les coordonn´
ees
initiales du point Pconsid´
er´
e(
`
a t=0), on suppose connues les relations xi=
xi(x0
1,x0
2,x0
3,t)qui donnent la position du point P`
a l’instant tqui ´
etait initialement
en P
0(x0
1,x0
2,x0
3)
(x0
1,x0
2,x0
3)sont les variables ind´
ependantes de Lagrange
Toute grandeur li´
ee `
a un ´
el´
ement mat´
eriel P du continu peut ˆ
etre ´
etudi´
ee en suiv-
ant sa trajectoire. Elle est alors fonction de (x0
1,x0
2,x0
3,t)
2.2 Cin´
ematique des fluides 7
Fig. 2.2 Trajectoire d’une particule mat´
erielle dans un rep`
ere de coordonn´
ees cat´
esiennes
(x1,x2,x3)
G=G(x0
1,x0
2,x0
3,t)
C’est le cas de
xi=xi(x0
1,x0
2,x0
3,t)position de P
Vi=Vi(x0
1,x0
2,x0
3,t)=dxi
dt =
∂
xi
∂
tvitesse de P
γ
i=
γ
i(x0
1,x0
2,x0
3,t)=d2xi
dt2=
∂
2xi
∂
t2acceleration de P
L’utilisation des variables de Lagrange fait intervenir la position initiale de la par-
ticule dans l’´
etat initial du syst`
eme. C’est la m´
ethode la mieux adapt´
ee `
a l’´
etude des
”solides” d´
eformables pour lesquels on peut d´
efinir un ´
etat initial et suivre facile-
ment la transformation.
Dans les milieux fluides l’´
etat initial n’a aucune importance sur les efforts in-
ternes `
a l’´
etat pr´
esent. La description de Lagrange est mal adapt´
ee `
a l’´
etude du
mouvement des fluides.
2.2.3 Description Eul´
erienne
En un point g´
eom´
etrique donn´
eMon se donne les composantes du vecteur
vitesse Vi=Vi(M,t)et toute grandeur physique attach´
ee au fluide G(M,t).
Soit dans un syst`
eme de coordonn´
ees cart´
esiennes :
Vi=Vi(x1,x2,x3,t)
G=G(x1,x2,x3,t)
(x1,x2,x3,t)sont les variables d’Euler.

8 2 Equations de conservation
On ne s’int´
eresse donc pas ici `
a l’histoire du continu consid´
er´
e mais `
a son champ
de vitesse `
a l’instant t.
G=G(x1,x2,x3,t)=G(x1(x0
1,x0
2,x0
3,t),x2(x0
1,x0
2,x0
3,t),x3(x0
1,x0
2,x0
3,t),t)
=G(x0
1,x0
2,x0
3,t)
2.2.4 D´
efinitions
•a - trajectoire Les ´
equations param´
etriques des trajectoires sont donn´
ees par la
r´
esolution du syst`
eme diff´
erentiel :
Vi=dxi
dt →dxi=Vi·dt
dx1
V1(x1,x2,x3,t)=dx2
V2(x1,x2,x3,t)=dx3
V3(x1,x2,x3,t)
L’int´
egration donne les relations
xi=xi(x0
1,x0
2,x0
3,t)
o`
ux0
1,x0
2,x0
3sont des constantes.
Exemple : photo de phares de v´
ehicules dans la nuit en exposition longue.
•b - ligne de courant
A un instant donn´
eond
´
efinit les lignes de courant (Fig. 2.3) comme les lignes
tangentes en chacun de leur point au vecteur vitesse en ce point. On d´
etermine
Fig. 2.3 Lignes de courant tangente en chaque point Mau vecteur vitesse V
les lignes de courant en ´
ecrivant V//dM,tfixe. On a V·n=0o
`
unest la normale
`
a la ligne de courant.
dx1
V1(x1,x2,x3,t)=dx2
V2(x1,x2,x3,t)=dx3
V3(x1,x2,x3,t)avec t =Cte
2.2 Cin´
ematique des fluides 9
Exemple : On peut observer les lignes de courant en tracant les tangentes aux
segments clairs laiss´
es sur une photo de phares de v´
ehicules dans la nuit en ex-
position courte.
•c - surface de courant
Surface tangente au vecteur vitesse.
•d - tube de courant
Ensemble de lignes de courant s’appuyant sur un contour ferm´
e.
•e - ligne d’´
emission
Toutes les particules qui passent successivement par un point Ssont situ´
ees `
a
l’instant tsur une courbe dite ligne d’´
emission relative `
aS.
Exemple : ligne trac´
ee dans le ciel `
a un instant donn´
e par un panache de fum´
ee.
•f-´
ecoulement stationnaire
Un ´
ecoulement est stationnaire par rapport `
aunr
´
ef´
erentiel lorsque la vitesse et
les autres variables ne d´
ependent plus du temps. Il y a alors identit´
e entre tra-
jectoire, ligne d’´
emission et ligne de courant, les syst`
emes r´
ef´
erentiels devenant
identiques.
Les qualificatifs de stationnaire, permanent, ´
etabli, stable ... sont pr´
ecis et cor-
respondent `
a des situations diff´
erentes; la stationnarit´
e est attach´
ee `
a une ind´
epen-
dance des variables dans le temps. La permanence est la persistance d’un ´
etat qui
peut ˆ
etre instationnaire alors qu’un ´
ecoulement ´
etabli traduit son ind´
ependance par
rapport `
a une direction spatiale. On parle de stabilit´
e ou d’instabilit´
e uniquement
par rapport `
a un ´
etat de r´
ef´
erence qui lui-mˆ
eme peut ˆ
etre stationnaire, oscillant,
p´
eriodique, etc.
2.2.5 Expressions des d´
eriv´
ees particulaires
Il s’agit de connaˆ
ıtre l’´
evolution de toute grandeur physique li´
ee `
a un ´
el´
ement
mat´
eriel que l’on suit dans son mouvement. Pour calculer par exemple une acc´
el´
eration
il s’agit de suivre l’´
evolution de la vitesse de l’´
el´
ement mat´
eriel consid´
er´
e quand il
se d´
eplace. On appelle d´
eriv´
ee particulaire d’une grandeur physique, la d´
eriv´
ee par
rapport au temps de cette grandeur quand on suit le point mat´
eriel dans son mou-
vement. On dit encore que la d´
eriv´
ee particulaire d’une grandeur physique est la
d´
eriv´
ee temporelle ou mat´
erielle ou totale.
2.2.5.1 En variables de Lagrange
La d´
eriv´
ee particulaire s’identifie `
alad
´
eriv´
ee partielle par rapport au temps
dG
dt =
∂
G
∂
t

8 2 Equations de conservation
On ne s’int´
eresse donc pas ici `
a l’histoire du continu consid´
er´
e mais `
a son champ
de vitesse `
a l’instant t.
G=G(x1,x2,x3,t)=G(x1(x0
1,x0
2,x0
3,t),x2(x0
1,x0
2,x0
3,t),x3(x0
1,x0
2,x0
3,t),t)
=G(x0
1,x0
2,x0
3,t)
2.2.4 D´
efinitions
•a - trajectoire Les ´
equations param´
etriques des trajectoires sont donn´
ees par la
r´
esolution du syst`
eme diff´
erentiel :
Vi=dxi
dt →dxi=Vi·dt
dx1
V1(x1,x2,x3,t)=dx2
V2(x1,x2,x3,t)=dx3
V3(x1,x2,x3,t)
L’int´
egration donne les relations
xi=xi(x0
1,x0
2,x0
3,t)
o`
ux0
1,x0
2,x0
3sont des constantes.
Exemple : photo de phares de v´
ehicules dans la nuit en exposition longue.
•b - ligne de courant
A un instant donn´
eond
´
efinit les lignes de courant (Fig. 2.3) comme les lignes
tangentes en chacun de leur point au vecteur vitesse en ce point. On d´
etermine
Fig. 2.3 Lignes de courant tangente en chaque point Mau vecteur vitesse V
les lignes de courant en ´
ecrivant V//dM,tfixe. On a V·n=0o
`
unest la normale
`
a la ligne de courant.
dx1
V1(x1,x2,x3,t)=dx2
V2(x1,x2,x3,t)=dx3
V3(x1,x2,x3,t)avec t =Cte
2.2 Cin´
ematique des fluides 9
Exemple : On peut observer les lignes de courant en tracant les tangentes aux
segments clairs laiss´
es sur une photo de phares de v´
ehicules dans la nuit en ex-
position courte.
•c - surface de courant
Surface tangente au vecteur vitesse.
•d - tube de courant
Ensemble de lignes de courant s’appuyant sur un contour ferm´
e.
•e - ligne d’´
emission
Toutes les particules qui passent successivement par un point Ssont situ´
ees `
a
l’instant tsur une courbe dite ligne d’´
emission relative `
aS.
Exemple : ligne trac´
ee dans le ciel `
a un instant donn´
e par un panache de fum´
ee.
•f-´
ecoulement stationnaire
Un ´
ecoulement est stationnaire par rapport `
aunr
´
ef´
erentiel lorsque la vitesse et
les autres variables ne d´
ependent plus du temps. Il y a alors identit´
e entre tra-
jectoire, ligne d’´
emission et ligne de courant, les syst`
emes r´
ef´
erentiels devenant
identiques.
Les qualificatifs de stationnaire, permanent, ´
etabli, stable ... sont pr´
ecis et cor-
respondent `
a des situations diff´
erentes; la stationnarit´
e est attach´
ee `
a une ind´
epen-
dance des variables dans le temps. La permanence est la persistance d’un ´
etat qui
peut ˆ
etre instationnaire alors qu’un ´
ecoulement ´
etabli traduit son ind´
ependance par
rapport `
a une direction spatiale. On parle de stabilit´
e ou d’instabilit´
e uniquement
par rapport `
a un ´
etat de r´
ef´
erence qui lui-mˆ
eme peut ˆ
etre stationnaire, oscillant,
p´
eriodique, etc.
2.2.5 Expressions des d´
eriv´
ees particulaires
Il s’agit de connaˆ
ıtre l’´
evolution de toute grandeur physique li´
ee `
a un ´
el´
ement
mat´
eriel que l’on suit dans son mouvement. Pour calculer par exemple une acc´
el´
eration
il s’agit de suivre l’´
evolution de la vitesse de l’´
el´
ement mat´
eriel consid´
er´
e quand il
se d´
eplace. On appelle d´
eriv´
ee particulaire d’une grandeur physique, la d´
eriv´
ee par
rapport au temps de cette grandeur quand on suit le point mat´
eriel dans son mou-
vement. On dit encore que la d´
eriv´
ee particulaire d’une grandeur physique est la
d´
eriv´
ee temporelle ou mat´
erielle ou totale.
2.2.5.1 En variables de Lagrange
La d´
eriv´
ee particulaire s’identifie `
alad
´
eriv´
ee partielle par rapport au temps
dG
dt =
∂
G
∂
t
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
1
/
43
100%