Laboratoire d`Analyse – Recherche en Economie Quantitative

1
Laréq
Par J. Paul Tsasa/ Chercheur co – accompli
Laboratoire
d’
Analyse
–
Recherche
en
Economie Quantitative
One pager
Avril 2012
Numéro-009
Copyright © tsasajp –laréq 2012
Initiation à La Macroéconomie DGE
Identité mathématique et Fondements théoriques
Jean – Paul Tsasa V. Kimbambu†
La macroéconomie DGE envahit, à ce jour, le champ de la Nouvelle théorie économique. Les outils
nécessaires pour appréhender cette nouvelle architecture de la vision macroéconomique sont quelques peu
complexes. Tout au long de ce papier, nous ouvrons la boîte à outils des considérations indispensables
à toute tentative d’auto – apprentissage et d’appréhension de cette nouvelle configuration de la
théorie macroéconomique.
PLAN
I. Identité mathématique de la macroéconomie DGE
1.1. Optimisation Dynamique non stochastique
1.1.1. Optimisation en Temps Discret [Méthode Lagrange]
1.1.2. Optimisation en Temps Continu [Calcul des Variations – Principe du Maximum –
Programmation Dynamique]
1.2. Optimisation Dynamique Stochastique [Optimisation en de valeurs anticipées et actualisées]
1.3. Cohérence et Incohérence Temporelles [Conservation et Non Conservation de l’optimalité au
passage du temps]
II. Fondements de la macroéconomie DGE
2.1. La macroéconomie keynésienne
2.2. La macroéconomie DGE n’est pas le complément de la macroéconomie keynésienne
2.3. Hypothèses fortes de la macroéconomie DGE
† Master en cours Economie – NPTCI 2011 ; Assistant CCAM – UPC et Chercheur au Laboratoire d’Analyse – Recherche
en Economie Quantitative [LAREQ] ; tsasajeanpaul@gmail.com – BP 16.626 Kinshasa I.

2
Laréq
Par J. Paul Tsasa/ Chercheur co – accompli
Identité mathématique de la macroéconomie DGE
La macroéconomie DGE s’intéresse aux problèmes d’optimisation intertemporelle. Ces derniers consistent
à optimiser une fonction – objectif‡ concave, additive, temporellement séparable et définie sur plusieurs
périodes, sous :
- des contraintes, dont au moins une est dynamique et prenant la forme d’une relation de
récurrence tell que : ;
- des conditions aux bornes données [les bornes peuvent être exogènes ou de variables de choix].
Cadre d’analyse
Choisir afin de maximiser la fonction concave, sous
contrainte vectorielle, i = 1, …, N.
Où : Ces variables évoluent dans le temps entre deux périodes 0 et T.
La variable d’état est liée aux instruments par les contraintes.
Le problème d’optimisation peut être :
- Non stochastique [anticipations parfaites] ou stochastique [incertitude sur futur] ;
- Analysé dans un cadre où le temps est discret [discrete time] ou continu [continuous time] ;
- Caractérisé par un horizon fini [finite horizon] ou infini [infinite horizon].
In fine, le problème d’optimisation dynamique sont également soumis aux conditions aux bornes :
- Les conditions aux bornes peuvent être exogènes ou des variables de choix ;
- La fonction – objectif§ :
Est additive et temporellement séparable de telle sorte que :
Avec 0 < β < 1, représente le facteur d’actualisation. β = 0 induit une optimisation
statique.
Etablit une relation de valeur actualisée définie à l’aide, d’une part, de variables de choix
ou de contrôle et d’autre part, de variables d’état ou non contrôlables.
‡ La fonction – objectif est souvent une relation de valeur actualisée définie par de variables de choix (variable de
contrôle) et de variables d’état (non contrôlable).
§ En effet, au passage du temps (entre 0 et T), les variables d’état parcourt un chemin ou trajectoire, pour lequel
chaque point correspond à une valeur prise par une fonction – objectif particulière. Et par conséquent, chaque
trajectoire vaut

3
Laréq
Par J. Paul Tsasa/ Chercheur co – accompli
Le problème d’optimisation intertemporelle consiste donc à identifier le chemin qui optimise la valeur
de la fonction Sa résolution peut être faite de plusieurs manières, par :
- L’utilisation des multiplicateurs [dynamiques] de Lagrange ;
- Le calcul des variations ;
- Le principe du maximum de Pontryagin ;
- Le principe d’optimalité de Bellman [programmation dynamique]
Le choix de chaque méthode est partiellement fonction du problème étudié.
1.1. Optimisation Dynamique non stochastique
1.1.1. Optimisation en Temps Discret
La méthode de Lagrange est appropriée pour résoudre un problème d’optimisation non stochastique en
temps discret. La fonction de Lagrange s’écrit donc comme suit :
Il y a T + 1 variables ; T + 1 contraintes et donc T + 1 multiplicateurs dynamique de Lagrange ().
En appliquant les conditions du premier ordre d’optimisation, on obtient :
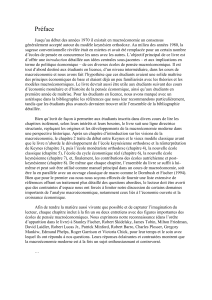
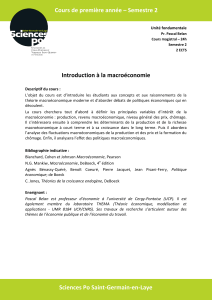
Illustration d’un problème d’optimisation dynamique (discret vs continu)
0
0
1
2
3
T – 1
T

4
Laréq
Par J. Paul Tsasa/ Chercheur co – accompli
1.1.2. Optimisation en Temps Continu
Trois méthodes de résolution seront illustrées. Il s’agit de : calcul des variations, du principe de
maximum de Pontryagin et du principe d’optimalité de Bellman [programmation dynamique]. Ces
méthodes sont appropriées pour résoudre un problème intertemporel non stochastique en temps continu.
Calcul des variations**
Principe du Maximum de Pontryagin††
Problème :
Tel que :
Ainsi, on a :
Problème :
Tel que :
Ainsi, on a [hamiltonien] :
Conditions du premier ordre :
Conditions du premier ordre :
Le choix de la variable de contrôle doit maximiser la
fonction h(.) :
La variable d’état et le multiplicateur satisfont à une
paire d’équations différentielles :
La solution obtenue est une solution en boucle ouverte (open – loop), puisqu’elle est va dépendra
uniquement de la variable temps.
Le principe d’optimalité de Bellman‡‡ [programmation dynamique] consiste à résoudre le problème
d’optimisation intertemporel période par période, en débutant par la dernière période (T), en considérant
[d’abord] les solutions des périodes précédentes comme donnée, et ensuite, en substituant la solution
obtenue en T dans le problème de la période T – 1. Et on reprend la même démarche de manière
séquentielle jusqu’à la première période.
Considérons une fonction additive et temporellement séparable.
Pour t, t +1, …, T ; sous les contraintes :
Et
** Cette méthode trouve ses origines dans les travaux de Bernoulli, Newton, Euler, Lagrange, Hamilton, Jacobi et
Legendre.
†† Du nom du mathématicien russe Lev Semenovich Pontryangin [3.09.1908 – 3.05.1982].
‡‡ Du nom du mathématicien américain Richard Ernest Bellman [26.08.1920 – 19.03.1984].

5
Laréq
Par J. Paul Tsasa/ Chercheur co – accompli
Pour la période T :
Sous contrainte :
En considérant comme une donnée.
Condition du premier ordre :
La solution pour est :
En substituant dans , on a :
Soit :
En conséquence :
Pour la période T – 1 :
Sous contrainte :
En considérant comme une donnée.
Condition du premier ordre :
La solution pour est :
En substituant dans , on a :
Soit :
En conséquence :
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%