34 Si cette propriété est vraie ∀ t0 et ∀ i = 1, · · · n alors le système

GEN1533 – Hiver 2009 – Chap. IV
34
4.3 Retour aux notions de commandabilité et d’observabilité
4.3.1 Rappels sur la définition de la commandabilité
La commandabilité a pour objet de caractériser la capacité d’un système à voir ses
caractéristiques dynamiques modifiées par les entrées.
Un état x
i
est commandable en t
0
s’il est possible de déterminer u(t) / [t
0
t
f
] conduisant tout état
initial x
i
(t
0
) vers 0 en t
0
≤
t
1
≤
t
f
.
Si cette propriété est vraie
∀
t
0
et
∀
i = 1,
·
·
·
n alors le système est complètement
commandable.
Remarques
- Si un système n’est pas complètement commandable alors pour certaines conditions initiales il
n’existe pas d’entrée de commande pouvant ramener le système à l’origine.
- La commandabilité est une notion importante puisqu’elle établit le fait que l’on puisse
commander le système afin de modifier son comportement (stabilisation d’un système instable,
modification des dynamiques propres). Cette notion joue donc un rôle très important dans la
théorie de la synthèse de systèmes de commande dans l’espace d’état.
- Un système trivialement non commandable est celui dont la matrice d’entrée est nulle, B = 0.
Critère de commandabilité
Il est difficile d’utiliser directement la définition précédente afin de décider de la commandabilité
d’un système LTI donné. La commandabilité est une propriété caractéristique du couplage entre
l’entrée et la sortie du système et fera donc intervenir les matrices A et B.
R.E. Kalman a proposé un critère simple construit à partir de ces deux matrices.
Théorème (critère de Kalman)
Un système LTI d’équation dynamique d’état,
o`u A
∈
R
n×n
, B
∈
R
n×m
est commandable ssi la matrice de commandabilité, C est
de rang n,
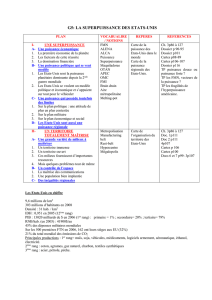
Exemple : Soit le système de bacs modélisé par:

GEN1533 – Hiver 2009 – Chap. IV
35
En prenant (x
1
, x
2
) = (h
1
, h
2
) et R
1
= R
2
= 1, c
1
= c
2
= 1, on obtient:
On peut alors calculer,
Cela implique que le système n’est pas complètement commandable. Physiquement, il est clair
que le niveau du bac 2 ne peut être modifié par la commande
4.3.2 Rappels sur la définition d’observabilité
Une caractéristique structurelle complémentaire (duale) de la commandabilité peut également être
définie. Elle correspond à la capacité pour un système à connaître l’historique d’un état interne à
partir de la seule connaissance de variables de sortie mesurées.
Un état x
i
est observable en t
0
s’il est possible de déterminer x
i
(t
0
) connaissant y(t) /
[t
0
t
f
].
Si cette propriété est vraie
∀
t
0
et
∀
i = 1,
·
·
·
n alors le système est complètement observable.

GEN1533 – Hiver 2009 – Chap. IV
36
Remarque :
La notion d’observabilité est cruciale pour les systèmes où le vecteur d’état complet n’est pas
accessible à la mesure mais doit être reconstruit, estimé ou filtré à partir des données fournies par
la sortie.
Critère d’observabilité
Un critère de Kalman existe également pour la notion d’observabilité et fait intervenir
la matrice dynamique A et la matrice de sortie C.
Théorème (critère de Kalman)
Un système LTI d’équations dynamique et de mesure,
o`u A
∈
R
n×n
, C
∈
R
r×n
est observable ssi la matrice d’observabilité, O est de rang n,
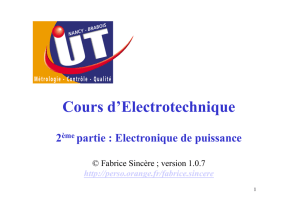
Exemple :
Soit le système modélisé par:
On peut alors calculer,
Cela implique que le système est complètement observable.
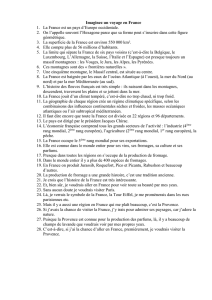
Exemple :
Le système suivant :
n’est pas observable puisque :

GEN1533 – Hiver 2009 – Chap. IV
37
Exemple à analyser :
Soit le système représenté par les équations d’état :
Modèle 1 :
−
−
=10
02
A
=1
2
B C =[ 3 0] ( et D = 0)
rang de la matrice d’observabilité : rang(O)=rang 1
06
03 =
−
=
CA
C
rang de la matrice de commandabilité : rang (C) = rang [B AB]= 2
11
42 =
−
−
Ce modèle est commandable mais pas observable.
Modèle 2 :
−
−
=10
02
A
=0
2
B C =[ 3 2] ( et D = 0)
rang de la matrice d’observabilité : rang(O)=rang 2
26
23 =
−−
=
CA
C
rang de la matrice de commandabilité : rang (C) = rang [B AB]= 1
00
42 =
−
Ce modèle est observable mais pas commandable.
4.3.3 Exemple de représentation d’état de quelques systèmes :
Systèmes multivariables linéarisés, ces modèles sont donnés sous la forme d’une équation d’état :
correspondant au modèle linéarisé autour d’un point de fonctionnement.
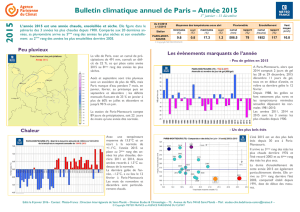
Modèle d’un sous-marin :
La manœuvre dans le plan vertical de la descente ou montée d’un sous-marin est réalisée à l’aide
des gouvernes de proue ou de poupe. Comme une phase de plongée ou de remontée doit être
réalisée à assiette constante, il est nécessaire d’agir sur les deux commande. Cela conduit à
nécessairement étudier un système mutivariable qui présente comme caractéristiques principales
un couplage entre les entrées et les sorties et des entrées à actions antagonistes. En effet,
manœuvrer une seule des deux gouvernes modifie à la fois la position verticale du centre de
gravité du sous-marin et son assiette, et actionner les gouvernes dans un sens identique conduit à
des effets qualitativement opposés. On peut remarquer que l’on aurait des caractéristiques
analogues si l’on s’intéressait aux modèles de vol des avions.

GEN1533 – Hiver 2009 – Chap. IV
38
Modélisations du comportement
Modèles linéarisés autour de deux vitesses de fonctionnement, 6 nœuds et 30 nœuds.
Variables :
- commandes : angles des gouvernes de proue et de poupe :
u
1
= δb, u
2
= δs;
- sorties : profondeur et angle de tangage :
y
1
= δh, y
2
= δθ;
Modèle d’état
1. Pour une vitesse de 6 nœuds :
2. Pour une vitesse de 30 nœuds :
Avion
En prenant comme variables :
- de commande :
- l’angle de la gouverne de profondeur (en dixièmes de degrés) ;
- la poussée (en m.s
-2
) ;
- l’angle de la gouverne d’élévation (en degrés) ;
- d’état :
- l’altitude (par rapport à une référence)
- la vitesse horizontale (en m.s
-1
) ;
- l’angle de tangage (en degrés) ;
- la vitesse de tangage (en degrés.s
-1
) ;
- la vitesse verticale (en m.s
-1
) ;
- de sortie : les trois premiers états ;
 6
6
1
/
6
100%