Lien

Seediscussions,stats,andauthorprofilesforthispublicationat:https://www.researchgate.net/publication/233414895
MODELISATION,COMMANDEETGESTIONDE
L'ENERGIED'UNVEHICULEELECTRIQUE
HYBRIDE
THESIS·JUNE2011
CITATION
1
READS
2,730
1AUTHOR:
SifEddineGuenidi
NationalPolytechnicSchoolofAlgiers
2PUBLICATIONS1CITATION
SEEPROFILE
Availablefrom:SifEddineGuenidi
Retrievedon:12March2016

MODELISATION, COMMANDE ET GESTION DE L’ENERGIE D’UN
VEHICULE ELECTRIQUE HYBRIDE
Guenidi Sif Eddine
Laboratoire de Commande des Processus (LCP), Ecole Nationale Polytechnique,
10, avenue Pasteur, Hassan Badi, BP 182, El Harrach, Alger, Algérie
Résumé — Ce travail est consacré à la modélisation et à la
simulation d’un véhicule électrique hybride ayant deux sources
d’énergies : un moteur thermique et une motorisation
électrique.
L’architecture série/parallèle est adoptée pour la modélisation
ainsi chaque organe de la traction est modélisé séparément, Le
modèle du véhicule construit pour la simulation consiste à
assembler les déférents blocs des composants en les reliant
d’une manière structurée tout en respectant la causalité
physique.
Pour la commande de l’ensemble motopropulseur une
stratégie de commande est développée, dont le rôle est de
choisir à chaque instant la meilleure répartition de puissance
entre les différentes sources d’énergie d’une manière à
minimiser la consommation de carburant et les émissions des
polluants.
Mots Clés — Véhicule électrique hybride, Simulation,
Modélisation, Stratégie de commande, Gestion de l'énergie
I. INTRODUCTION
L'industrie automobile est confrontée à une pression
croissante pour créer des véhicules qui profitent des sources
d'énergies alternatives.
L’augmentation du prix du carburant et les normes de
plus en plus strictes d'émissions exigent que les nouvelles
technologies développées répondent à ces besoins. En même
temps, l'industrie automobile a besoin de satisfaire sa
clientèle en gardant toujours haut ces standards de
performances, et pourtant l'industrie veut continuer à
bénéficier de l'infrastructure déjà en place comme les «
stations-services ».
Des entreprises telles que Toyota, GM, et Ford ont
consacré beaucoup d'efforts afin d’apporter de tels systèmes
sur le marché. Développer un système qui fusionne les
nouvelles technologies « sources d'énergie électrique :
moteurs, batteries, pile à combustible » avec les techniques
existantes « moteurs à essence/diesel » afin de produire un
véhicule hybride, cela nécessite un processus de
développement à grande échelle qui met en contribution tous
les ingénieurs participant au design. Un tel système fait
partie des systèmes pluridisciplinaires il demande des
compétences multiples pour son développement, sa
conception et sa gestion d’énergie. [1]
II. MODELE DE SIMULATION
Dans cet article, nous examinons un modèle de véhicule
hybride-électrique de type série/parelle sous Matlab
/Simulink, en utilisant les positions de la pédale
(accélérations /décélérations) déduites du cycle de conduite,
comme signal d’entrée principale.
La simulation illustre le flux d'énergie et sa distribution en
vertu des différents modes de fonctionnement du véhicule
hybride.
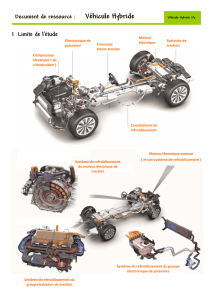
Tous les éléments de traction sont modélisés et regroupés
pour créer un modelé énergétique (Figure 1) capable de
simuler le comportement hybride , qui associe les différentes
sources d’énergie de manière efficace et optimale à l’aide
d’un système de commande qui se base sur une logique
permettant un partage de puissance bénéfique qui se traduit
par une économie du carburant diminuant les rejets polluants
l’atmosphère .
Figure 1 : Vue générale du modèle de simulation du véhicule hybride
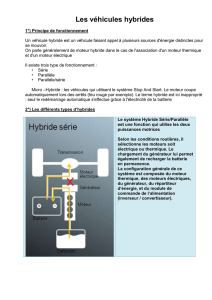
A. Cycle de Conduite
Dans le cadre de cette étude, un cycle de conduite
exprime l’évolution de la vitesse du véhicule en fonction du
temps. Il permet d’évaluer la consommation et/ou les
émissions de polluants du véhicule dans des conditions de
conduite identiques.
Pour les besoins de la simulation et pour reproduire un
trajet routier avec différentes conditions de conduites on a
recours au cycle de vitesse européen normalisé (NEDC),
Figure 2.
Figure 2: Cycle de vitesse Européen Normalisé (NEDC)
Arbre Moteur
Electrique
Système de
Management
d’énergie
Moteur
Thermique
Batterie
Convertisseur
DC/DC
Moteur
Electrique
Dynamique
du Véhicule
Génératrice
Electrique
Train
Mécanique
Position du Pédale
Puissance Electrique
Puissance Mécanique
Signaux de Commande
Moteur Elec Couple Ref
Géné Couple Ref
Mth Couple Ref
Arbre Gén
Arbre Moteur
Thermique
Bus Vdc

B. Dynamique du véhicule
Les différentes forces auxquelles le véhicule en
mouvement est soumis sont représentées sur la Figure 3
Figure 3 : Les forces agissants sur un véhicule [2]
Le comportement d'un véhicule en mouvement le long de
son sens de déplacement est déterminé par toutes les forces
qui agissent sur lui dans cette direction. La Figure 3 montre
les forces agissant sur un véhicule dans une pente.
L'effort de traction, Ft, dans la zone de contact situé entre
les pneus des roues motrices et la surface de la route
propulse le véhicule vers l'avant. Il est produit par le couple
du moteur, et ensuite transféré à travers la transmission aux
roues motrices.
Lorsque le véhicule est mobile, il ya une résistance qui
tente d'arrêter son mouvement, cette résistance comprend en
général la résistance au roulement, la traînée aérodynamique
et la résistance en montée.
Selon la deuxième loi de Newton, l'accélération du
véhicule peut être écrite comme :
M
FF
dt
dV rt
.
, (1)
Ou V est la vitesse du véhicule, ∑ Ft est l'effort de traction
totale du véhicule ∑ Fr est la résistance totale, M est la
masse totale du véhicule, et ∂ est le facteur de masse qui aide
à convertir les inerties rotationnelles des éléments de
rotation en translation.
L'équation dynamique du mouvement du véhicule le long
de la direction longitudinale est :
wgrrrftrtf FFFFFF
dt
dV
M )(
(2)
Frf et Frr, : Résistances de roulement des pneus avant et
arrière
Ftf et Ftr, : Effort de traction des pneus avant et arrière
Fw: Trainée Aérodynamique
Fg : Résistance de la pente
Le modèle dynamique choisi est un modèle simplifié qui
ne tient pas compte des forces de roulis et de tangage. Le
véhicule est modélisé comme une masse en mouvement
soumise à la force motrice Ft développée par le groupe
motopropulseur et à différents efforts liés à l’environnement.
En appliquant le principe fondamental de la dynamique
sur l’équation 2, on peut déduire la vitesse V. [2]
C. Moteur Thermique
Un moteur thermique convertit une énergie chimique en
énergie mécanique. Les moteurs thermiques les plus utilisés
actuellement sont les moteurs à essence et les moteurs
Diesel.
Le moteur est modélisé avec une seule entrée qui est la
consigne de couple du moteur et qui correspond à la position
de la pédale d'accélérateur du véhicule.
En sortie, un vecteur contenant le couple et la vitesse du
moteur est disponible. Ce bloc est une modélisation très
simple n'incluant pas la dynamique de la combustion et ne
faisant pas apparaître de frottement ainsi que les pertes
associées. [3]
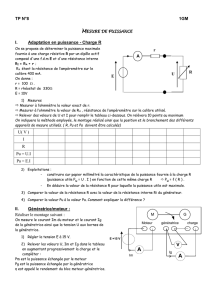
La figure 4 représente les caractéristiques Couple/Vitesse
et Puissance/Vitesse du moteur thermique.
Figure 4 : les Caractéristiques Couple/Vitesse et Puissance/Vitesse du
moteur thermique
D. Train Planétaire
Figure 5 : Train planétaire
Le véhicule hybride additionne 3 sources d’énergie, l’une
est thermique et deux sources électriques, cela implique
l’utilisation d’un répartiteur de puissance pour pouvoir
bénéficier pleinement du rendement de chaqu'une
Le type de répartiteur de puissance utilisé est un train
planétaire épicycloïdal (Figure 05). Il permet d’avoir une
addition de couples des trois moteurs sans imposer un
rapport fixe entre les régimes. Le train planétaire
épicycloïdal est composé d'un pignon planétaire associé à
des pignons satellites (appelés ainsi car les satellites tournent
autour du planétaire comme dans le système solaire). Le
train planétaire reçoit, par la couronne à denture interne, la
puissance du moteur électrique et par le porte-satellites celle
du moteur thermique. Le pignon soleil étant solidaire de la
génératrice. [3]

E. Batterie
Nous présentons une des voies technologiques possibles
d’alimentations embarquées. Il s’agit des batteries utilisées
dans tous les véhicules hybrides actuels.
Les types de batteries choisies sont les batteries nickel-
hydrure de métal, elles possèdent des performances
massiques et volumiques très supérieures aux technologies à
base de plomb ou de cadmium et on profite du
développement de l’électrode à base de nickel utilisée pour
les batteries Ni-hydrogène développé pour les applications
spatiales. Ce type de batterie, dans sa version traction, à
équipe principalement les véhicules des constructeurs
japonais comme la Toyota Prius.
Le modèle de batterie utilisé [4] est simplement une source
de tension contrôlée en série avec une résistance interne
mais il reproduit exactement les courbes de charge et de
décharge de la plupart des types de batteries, c’est un modèle
dynamique et paramétrable.
Le schéma suivant illustre le circuit équivalent du
modèle dynamique :
Figure 6 : Un model de batterie générique paramétrable.
Ebatt = Tension non linéaire (v), E0 = Tension constante
(v) Exp(s)= Dynamique exponentielle de zone (v)
Sel(s)= Représente l’état de la batterie. Sel = 0 pendant la
décharge, Sel = 1 pendant la charge.
K= Constante de K = de polarisation ou résistance
de polarisation (ohms).
TABLE I : L’expression mathématique (
i*= Dynamique du courant en basse fréquence (A).
i= Courant de batterie (A),
it=Capacité extraite (Ah),
Q=Capacité maximum de batterie (oh)
A= Tension exponentielle (v),
B= Capacité exponentielle ,
L = Laplace
La Table 01 récapitule les expressions mathématiques
utilisées comme fonctions ( de charge et de décharge
respectivement pour la batterie nickel-hydrure de métal.
F. Convertisseurs
Dans la plupart des véhicules hybrides, on se trouve
confronté à la compatibilité des sources d’énergie à courant
continu et à courant alternatif, et à l’intérieur d’une même
catégorie, à des compatibilités entre les tensions des sources
et des récepteurs. Ce problème sous-entend la présence à
bord des véhicules électriques de convertisseurs
électroniques dont le rôle est de lever les incompatibilités de
fonctionnement.
Figure 7 : System de traction électrique d’un véhicule hybride.
Deux types de conversions sont utilisés dans la partie
traction électrique du véhicule hybride :
1. Un Convertisseur AC/DC (Redresseur)
Un redresseur est utilisé en sortie de la génératrice pour
convertir la tension triphasée alternative en tension continue.
Un convertisseur est également utilisé pour convertir le
courant continu en courant alternatif triphasé pour alimenter
le moteur.
2. Un Convertisseur DC/DC (Hacheur)
Le véhicule hybride abrite une batterie de (20 kW) d’où
la nécessité d’avoir un convertisseur DC/DC pour permettre
d’augmenter la tension de 202 V à 500 V. La puissance en
entrée et en sortie du convertisseur est de 20 kW. La tension
du bus DC aux bornes du condensateur est régulée à
500V.[6]
Tous les convertisseurs utilisés sont bidirectionnels de
façon à permettre au courant de circuler dans les deux sens
selon le mode de fonctionnement utilisé (freinage ou
traction).
Type de
batterie
Ni-
Metal -
Hydrure
( < 0)
( > 0)
30 kW
50 kW
Génératrice
Conversion
AC/DC
Moteur
Conversion
AC/DC
20 kW
20 kW
Conversion DC/DC
Batterie
L
K1
K2
Cbus

G. Moteurs Électriques
Figure 8 : Toyota e-CVT transmission : MG1 est à gauche, MG2 à
droite, le train épicycloïdal au centre.
Le bon choix de la partie électrique du véhicule hybride
est l’élément majeur pour la réussite du mariage entre le
thermique et l’électrique.
Pour cela Le moteur synchrone à aimants permanents
(MSAP) semble à plus d’un titre, la solution la plus adaptée
pour une traction automobile grâce à ses performances
techniques et en particulier, sa compacité et son rendement.
Il a été retenu par Toyota dans la Prius pour les raisons
suivantes :
bon rendement
bonnes performances dynamiques grâce à la faiblesse
des inductances statoriques due à la largeur importante
de l’entrefer apparent.
champ magnétique important dans l’entrefer ;
pas de source de tension continue pour l’excitation
La Modélisation de la MASP
La modélisation de la MSAP passe par une représentation
d'état du deuxième ordre en utilisant la transformation de
Park. Cette représentation est nécessaire car les entrées et les
sorties du modèle de la machine synchrone sont exprimées
dans le référentiel a,b,c. La transformation de Park permet
de convertir les tensions et les courants pour chaque bobine
dans le référentiel a,b,c en deux composantes dans le
référentiel d,q,O. (Figure 9 )
Figure 9 : Machine équivalente au sens de Park.
Les équations électriques et mécaniques de la machine
synchrone sont les suivantes :
*
Les véhicules hybrides équipes d’un moteur à courant
alternatif, alors il est nécessaire d’interposer entre la source
d’énergie et le (ou les) moteur(s) de traction un dispositif de
conversion appelée onduleur, qui transforme l’énergie
électrique à courant continu en énergie électrique à courant
alternatif et qui permet de réaliser la commande du couple
des moteurs et le réglage de la vitesse du véhicule tant en
mode traction qu’en mode freinage.
La conversion DC/AC peut être réalisée de multiples
manières. Mais l’usage, les particularités des véhicules
routiers et la rationalisation des solutions industrielle ont
conduit à privilégier une structure d’onduleur à six
interrupteurs bidirectionnels constituée par l’association
d’un IGBT et d’une diode montes en antiparallèle et
commandes selon une loi du type MLI (Modulation de
Largeurs d’Impulsion, en anglais (PMW). Ce type de
montage permet d’associer une source de tension (de type
batterie) et un récepteur de type source de courant (moteur
asynchrone, moteur synchrone bobine, a aimant permanent
ou a reluctance variable).
L’onduleur est commandé par la technique de Modulation
de la Largeur d’Impulsion (MLI). Elle consiste à imposer
aux bornes de la machine des tensions, hachées à fréquence
fixe, évoluant en fonction des références de tension obtenues
à partir des régulateurs des courants. A l’aide d’un signal
triangulaire appelé porteuse, ces tensions sont modulées en
largeur d’impulsion afin de déterminer les instants de
commutation et la durée de conduction de chaque
interrupteur de l’onduleur. A chaque instant, l’un des deux
interrupteurs de chaque bras est en conduction et l’autre est
bloqué.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%