BE Composants Passifs

1
Dimensionnement des composants passifs d’un
convertisseur Buck
SOF IA NE AÏ T CH ABA NE ROM AIN GI R ARD
UFR PhITEM - Université Joseph Fourier
Master EEATS 1année, majeure SEE
Résumé— Le sujet de ce BE est le dimensionnement du
filtre LC constituant un convertisseur Buck.
En premier lieu, nous étudierons un modèle parfait de la
structure afin de dimensionner les composants passifs en
question et faire un choix de composants disponibles sur le
marché. À partir de ces choix, nous compléterons l’étude
en tenant compte des éléments parasites tout en respectant
les contraintes imposées dans le cahier des charges.
I. INTRODUCTION
Dès le début des années 1980, le monde a commencé à se
préoccuper de la gestion de l'énergie dans divers domaines.
Celle-ci est devenue une nécessité depuis la prise de
conscience des sources d'énergies limitées en plus d'êtres
polluantes. Fabriquer des dispositifs non optimisés eu égard à
leurs pertes est alors devenu inconcevable, que ce soit dans le
domaine des très hautes puissances que des petites, utilisées
par le grand-public. La recherche d’un rendement élevé et la
qualité des tensions d’alimentation sont des critères essentiels.
Les alimentations à découpage fonctionnent sur le principe de
stockage inductif d’énergie où sa restauration est effectuée lors
de la demande de la charge. Dans ce BE, nous sommes amenés
à travailler sur les composants passifs d’un hacheur abaisseur
dit Buck. C’est un convertisseur de tension continue-continue
(DC/DC) qui sort en sortie une tension réglable de plus faible
valeur que celle fournie en entrée.
Comment fonctionne ce convertisseur et par quelles approches
le dimensionnerons-nous ?
Cahier des charges
Puissance à fournir : 50W Tension de sortie : 10V
Tension d’entrée : 24 V (batterie)
Fréquence de découpage : 20kHz
Ondulation de tension max : 5% de la tensio de sortie Vs
Rendement : 95%
Mode de fonctionnement : Limite de conduction continue.
II. FONCTIONNEMENT DU MONTAGE
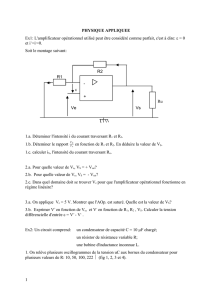
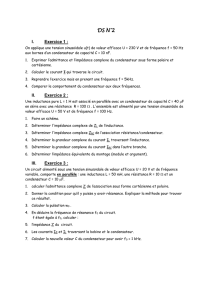
Schéma de la structure :
Fig. 1 Schéma du montage Buck
La source de courant continu E (batterie) est en convention
générateur. Tous les autres éléments sont en convention
récepteur. Les courants respectifs traversant chaque élément
seront noté « i » suivis du même indice que les tensions
associées.
Mode de fonctionnement :
Le cahier des charges impose un fonctionnement en limite
de conduction continue. C'est-à-dire que le courant dans
l’inductance démarre de zéro en début de période (t=0) et
s’annule à t=T, exclusivement.
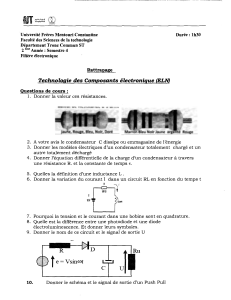
Formes d’ondes
Ce convertisseur est commandé par commutation du
transisitor. Il y a deux configurations envisageables:
• Passant de 0 à T:
L’interrupteur K est fermé.
La tension aux bornes de l’inductance vaut .
Le courant dans l’inductance augmente linéairement avec une
pente de
.
La tension aux bornes de la diode est négative, donc la diode
est bloqué. On fait l’hypothèse que est constant et que ne
change pas. (Valable sur toute la période T). La caracteristique
du courant sera identique à celle de mais décalée de
manière à obenir (Proprieté du condensateur).
• Bloqué de T à T :
L'interrupteur K est ouvert. .
Sachant que le courant dans une inductance ne peut subir de
variation brusque, la diode devient donc passante afin d'assurer
la continuité du courant dans l'inductance. La tension aux
bornes de l'inductance vaut .Par conséquent, le
courant traversant l'inductance décroît avec une pente de
.
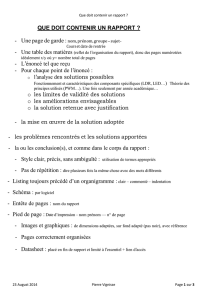
Les formes d’ondes tracées sont considerées en régime
pérmanent, c'est-à-dire qu’elles resterons inchangées à chaques
période. Les signaux à la fin de chaque période corréspond à
celles du début de la précédente.
TP COMPOSANTS PASSIFS 12/13

2
Fig. 2. Formes d'ondes en régime pérmanent
III. ETUDE DU MODELE PARFAIT
Dans un premier lieu, considérons la structure sans les
résistances série parasites. Ceci nous permettera de determiner
l’inductance et le condensateur à utiliser de manière simple
mais pas pour autant érronée. De cette manière nous aurons
une idée des ordres de grandeur cohérante. A partir des
composants choisis subséquement, la détermination des
résistances associées ce fera à partir des données fournies par le
constructeur, dont elles sont fonction.
A. Mise en équation de la structure
D’après les formes d’ondes déterminées précédemment et
les lois de Kirchhoff, nous avons pu en déduire les expressions
suivantes :
Phase 1 : de 0 à αT.
(1)
(2)
Phase 2 : de αT à T.
(3)
(4)
(5)
(6)
(7)
B. Détermination de l’inductance L
Nous allons tout d’abord déterminer la valeur de
l’inductance L à partir de l’écriture de la valeur moyenne du
courant.
(8)
On en déduit L :
(9)
L
Dimensionnement de l’inductance L
Le choix de l’inductance revient au choix du noyau
magnétique ETD à utiliser, sur lequel s’effectuera le bobinage.
Celui-ci peut être caractérisé par divers paramètres physiques,
à savoir le type de matériau, la taille, la géométrie etc.
Cependant, le critère à étudier pour un choix optimal est le
« produit des aires » noté Ae.Sf. Le produit de Ae (surface utile
au flux) avec Sf (surface de la fenêtre bobinable) est lié au
volume et à l’énergie magnétique max stockable.
(10)
Le courant max admissible dans la bobine est de Imax=10A.
Nous prendrons un coefficient de bobinage de Kb=0.4 qui
représente la place perdue entre les parties actives du bobinage.
Dans notre cas la densité de courant J vaut 5A/m²v (valeur
typique). Nous aurons également besoin de la valeur efficace
du courant :
(11)
Le produit des aires vaut donc :
Il suffit de choisir à présent un noyau magnétique à partir
des datasheets disponibles. Nous determinerons celui-ci
d’après le document [1].
Nous choisirons le noyau magnétique PQ20/20 de type 3F3 car
il est possible de l’utiliser à la fréquence de fonctionnement
souhaitée. La surface utile donnée est de et la
surface bobinable
(12)
.Son produit des aires
vaut donc . La condition
est bien validée.
Après avoir choisi A, nous nous rendons compte que le
champ d’induction magnétique souhaité sera supérieur à celui
du noyau ETD choisit.
(13)
et Blim=0.32T
Comme Bmax>Blim, nous devons trouver la bonne perméance
pour ne pas saturer le noyau.
L’ajout d’un entrefer est alors indispensable.
• Determination de l’entrefer :
Pour cela, calculons le nombre de spires eu égard au champ
magnétique Blim souhaité :
(14)
N
A présent, calculons l’entrefer à partir de ce nombre N de
spires
(15)
.
Il existe des petites plaquettes qui permettent de réaliser des
entrefers, dans notre cas, nous prendrons une de 0.6 mm
d’épaisseur.
Le constructeur de l’ETD propose le même noyau avec cet
entrefer. Finallement le noyau qu’on choisi est l’ETD PQ20/20
– 3F4 – A160 d’après le document[1].
La valeur de l’entrefer choisi est un petit peu supérieure à celle
calculée, nous devons alors recalculer le nombre de spires
correspondant.

3
(16)
finallement.
Dimensionnement des fils
Nous allons calculer la section des fils à l’aide de
l’épaisseur de peau. Nous savons qu’en basse fréquence, le
courant transitant à travers une section de fil de cuivre, prend
toute la surface : la réparation des charges est homogène.
En haute fréquence, en revanche, le courant est repoussé vers
les bords d’autant plus qu’on élève la fréquence. Les
conséquences sont qu’une partie considérable du cuivre (dont
le prix est élevé) n’est pas utilisée et les pertes engendrées sont
d’autant plus importantes.
(17)
(de rayon).Avec la résistivité ρ du cuivre qui
vaut . La section max du fil est alors
(18)
.
Nous prendrons donc des fils de 0.9 mm de diamètre. Vérifions
aussi si le fil peut supporter le courant qui le traversera . Le
courant max par fil est :
(19)
.Sachant que nous aurons un
courant efficace de 5.77 A qui circulera dans ce fil, le nombre
de fils necessaires est :
.
Deux fils en parallèle lors du bobinage sont alors necessaires
afin de pouvoir faire circuler le courant assurant le bon
fonctionnement du montage.
C. Dimensionnement du condensateur C
Le condensateur de sortie C sert à filtrer la tension de sortie.
Plus la valeur de C est grande, plus le signal de sortie est lissé,
mais d’autre part, le courant absorbé atteint des pics plus
considérables.
Les paramètres dimensionnants d’un condensateur sont sa
capacité et la tension max qu’il peut supporter.
La valeur du condensateur nous sera donnée à partir de ,
valeur crête-à-crête du signal Vs en régime pérmanent dont il
dépend.
D’après la loi des nœuds nous pouvons écrire
Phase 1 : de 0 à αT
En dérivant l’expression de nous avons trouvé que le
point max de se trouve à donc :
Phase 2 : de αT à T
En dérivant l’expression de nous avons trouvé que le
point max de se trouve à et donc :
(25)
Nous trouvons que dans le cas ou on fait une
étude en régime pérmanent, où les signaux en début de période
sont similaires à ceux de la fin.
donc
Il nous faut donc un condensateur qui puisse supporter 10 V en
continu et qui limite l’ondulation de tension de Vs à 5% de
Vsmoy.
A l’aide du document [2] nous avons choisi le condensateur
« FELSIC 125 FRS (BC) CO 47 » de valeur nominal 220 µF et
de tension nominal 16 V.
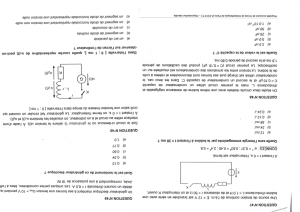
D. Test du convertisseur
Dans cette partie nous allons tester le fonctionnement du
montage à l’aide du logiciel PSIM, afin de valider la cohérance
de nos calculs.
Fig. 3. Schéma du montage
En premier lieu, la phase de test se fera sans les résistances
série parasites de l’inductance et du condensateur (et ).
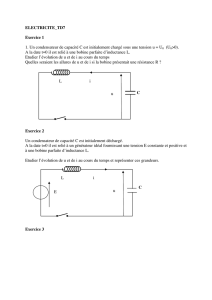
Observons l’allure de Vs(t)
Fig. 4. Vs=f(t)
La tension Vs(t) correspond au cahiers des charges, la tension
moyenne du signal , l’ondulation max de
.
La tension moyenne relevée aux bornes de l’inductance
. Le courant moyen traversant la bobine
est au lieu de 5 A théorique.

4
Fig. 5. IL=f(t) et UL=f(t)
La courbe ic(t) correspond bien à celle voulue par le cahier des
charges.
Avec .
Fig. 6. Ic=f(t)
Le dimensionnement effectué satisfait les contraintes posées
par le cahier des charges. Cependant, c’est un modèle parfait,
dont nous éstimerons par la suite sa fidélité à la réalité.
IV. ETUDE DU MODELE REEL
Dans cette partie nous prendrons en compte les résistances
série parasites de l’inductance et du condensateur.
A. Determination des resistances parasites
Résistance de l’inductance
Sachant que notre diametre de fil est de 0.9 mm (un peu plus
petit que le diamètre de peau), nous pouvons calculer la
longueur totale de fil à prendre pour le bobinage de
l’inductance.
Avec r : rayon du fil.
ltot
Donc la résistance
. Cependant nous avons précisé précedemment
que nous mettions deux fils en parallèle ce qui revient à deux
résistances en parallèles :
Résistance du condensateur
Pour la determiner, nous avons tout simplement regardé dans la
documentation[2] du condensateur choisi. Nous avons relevé
la resistance serie (aussi appelé ESR) (à haute
fréquence).
A. Simulation sur PSim
Observons le comportement du système avec l’ajout des
nouveaux éléments. Voir fig. 3. Schéma du montage.
Observons la courbe de Vs :
<Vs>=10V. C’est la valeur souhaitée.
Cette valeur ne respecte
pas celle du cahier des charges qui impose une valeur de 0.5.
Un redimensionnement s’avère alors necessaire malgré la
valeur de la puissance en sortie
Ps=49,97W
Fig. 7. Vs=f(t) et Is=f(t)
La tension moyenne relevée aux bornes de l’inductance
. Le courant moyen traversant la bobine
est au lieu de 5 A théorique. Les résistances
série n’influent que très peu sur les caractéristiques de
l’inductance.
Fig. 8. VL=f(t) et IL=f(t)
La tension mais soulignons que .
Ceci est due aux résistances parasites, modifiant tensions et
courants. Cependant, celles-ci sont relativement de faibles
valeurs, ce qui explique cette ressemblance.
La courbe ic(t) correspond bien à celle voulue par le cahier des
charges.
Avec , fluctant entre -5 A et 5 A.
Fig. 9. Vc=f(t) et Ic=f(t)
Nottons aussi que pour avoir les même signaux que ceux
observés dans le cas idéal, il faut compenser l’ajout des

5
résistances série par une augmentation de la valeur de
l’inductance, la capacité n’influant que sur la forme du signal.
B. Méthode de dimensionnement
Nous proposons une autre méthode qui nous semble plus
correcte eu égard à l’imperfection des composants considérés :
Grâce à la loi des mailles, on détérmine l’expression
de IL(t) à partir de l’equation différentielle associée.
Conditions initiales : IL(t)=0. Après résolution, on trouve la
solution suivante :
On utilise la relation des valeurs moyennes suivantes :
<IL>=<Is>=
. On obtient ainsi une première équation en fonction de .
<IL(t)>
Nous obtenons une seconde équation en utilisant le
rendement qui nous donnera la puissance de sortie, celle-ci
étant fonction de
L’expression des pertes dans les résistances est :
Toujours en se servant de la loi des mailles, on peut
écrire
En découle l’équation différentielle suivante :
Un des cas limite peut s’écrire :
Avec .
Ic , en fonction de C et Rc est détérminable grâce à son
équation différentielle et sa valeur moyenne <Ic(t)>=0.
Nous nous retrouvons avec trois équations à quatre
inconnues. Nous n’arrivons pas à savoir si une des quatres
inconnues est un parametre dépendant des autres.
V. CONCLUSION
L’étude menée sur ce convertisseur Boost a pérmis, malgré un
dimensionement réaliste non réalisé, de mettre en évidence
l’ampleur des effets induits par les élements parasites des
composants passifs utilisés. En effet, malgré leur faible valeur,
les résistances parasites nous ont mené à redimensionner
l’inductance et la capacité du filtre LC du hacheur. Nonobstant
le respect de plusieurs conditions, le taux d’ondulation, lui ne
respecte plus le cahier des charges et faille au but primaire du
Boost : fournir une tension continue viable.
REFERENCES
[1] Ferroxcube, Soft Ferrites and Accessories 2005 p. 691
[2] Würth Elektronik, Electronic Interconnect & Electromechanical
Solutions SIC-SAFCO : Condensateurs Electrolytiques Aluminium
2008 p. 34
1
/
5
100%