Sujet "ROBOT CHIRURGICAL"

corrigé du Sujet PT - SI A - 2005
"ROBOT POUR LA CHIRURGIE ENDOSCOPIQUE"
2- ANALYSE FONCTIONNELLE
Question 1. :
Console
Energie
électrique
Paramètres
opérateur
Dispositif de
traitemen
t
Energie
électrique Programme
Un « axe » du robot esclave
Energie
électrique
Paramètres de
réglage du robot
Moteur et chaîne
cinématique
G1 G2
G4
G5
F1
F2
F3
F4
Carte de commande
d’axe (préactionneur)
G3
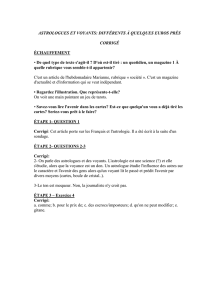
Compléter la description fonctionnelle sous forme SADT
d’un « axe » du robot chirurgical en remplissant les 3 cases
vides des grandeurs physiques et les 4 cases vides des
fonctions, sur le tableau « Réponse 1 » du document
réponses.
Grandeurs physiques :
G1 Mouvements (consignes) du chirurgien
G2 Informations électriques (consignes)
G3 Informations électriques (consignes) traitées
G4 Energie électrique
G5 Mouvements de l'instrument chirurgical + effort
Fonctions :
F1 Transformer les mouvements du chirurgien en informations électriques (consignes)
F2 Traiter les informations (consignes) électriques
F3 Distribuer l’énergie électrique en fonction des consignes
F4 Transformer l’énergie électrique en énergie mécanique pour générer les mouvements de l’instrument
Question 2. :
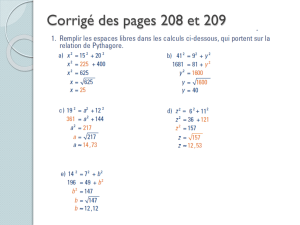
Proposer des solutions techniques qui permettent de réaliser ce système à retour d'effort ;
- Compléter la figure R2 en mettant en place les blocs fonctionnels ;
- Donner dans les cases prévues sous la figure R2, la désignation des grandeurs physiques transformées, les moyens
proposés pour réaliser les transformations, et les fonctions décrivant ces transformations (le nombre de lignes utiles de
ces tableaux n’est pas imposé).
Moyens :
M11 Capteur d’effort
M12 Dispositif de traitement
M13 Préactionneur électrique (carte de
commande)
M14 Actionneur électrique
Effort exercé sur la
main du chirurgien
Effort exercé sur
l'outil chirurgical
G12
F12
M12
G13
F13
M1 3
F14
M14
Energie électrique
G11
F11
M11
Grandeurs physiques :
G11 Signal électrique (information)
G12 Signal électrique traité
G13 Energie électrique
Fonctions :
F11 Transformer l’effort exercé sur l’outil en
signal électrique (information)
F12 Traiter le signal électrique
F13 Distribuer l’énergie électrique
F14 Transformer l’énergie électrique en effort
Question 3. :
Proposer une expression de la fonction de service qui définit la relation entre l’instrument chirurgical et la plaque
d’extrémité (figure 1-7) du bras du robot esclave ;
proposer trois critères que vous jugez importants pour quantifier cette fonction de service.
FS : permettre la fixation de l’instrument chirurgical sur la plaque d’extrémité ;
Critères :
résistance aux efforts ; précision du positionnement ; rapidité de montage/démontage ; liberté de
fonctionnement des poussoirs ; adaptabilité aux formes d’instruments.
Corrigé PT SIA – 2005 page 1/17

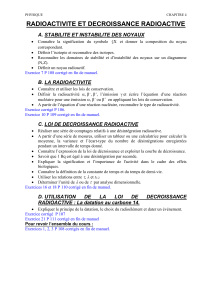
3- RESPECT DES CRITERES ASSOCIES A LA FONCTION DE SERVICE
"FS 1"
3-1 Traitement du problème d’hyperstatisme
Question 4. :
Déterminer γ, le « nombre cyclomatique » ou nombre
de cycles indépendants de la structure étudiée.
1+−= solidesliaisons NN
γ
= 8 – 7 + 1 = 2 cycles
Question 5. :
Mettre en place le système des 6 équations de
cinématique qui correspond à la fermeture de la chaîne
de solides (3-5-4-6-3) et aux liaisons en A, B, D, C.
Les torseurs cinématiques seront pour cela exprimés
au point A et dans la base (X0, Y1, Z1).
Equation de fermeture de chaîne :
{}{}{}{}
{
}
03/66/44/55/3 =+++ VVVV
Ecriture des torseurs :
{}
)1,1,0(
35
5/3
00
00
0
zyxA
p
V⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
{}
)1,1,0(
54
54
54
)1,1,0(
54
4/5
cos0
sin0
0
00
00
0
zyxA
zyxB p
p
p
p
V⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⋅⋅− ⋅⋅−=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
θ
θ
l
l
car : 0
54
0
54
04/54/5,4/5, ^^ zpxpyBAVV BA
r
l
r
r
l
r
r
r
r
⋅⋅−=⋅=Ω+=
{}
)1,1,0(
46
46
46
)1,1,0(
46
6/4
cos0
)sin(0
0
00
00
0
zyxA
zyxD p
cp
p
p
V⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⋅⋅− ⋅−=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
θ
θ
l
l
car : 1
46
0
46
0
46
106/46/4,6/4, )^(^ ypczpxpzcyDAVV DA
r
r
l
r
r
r
l
r
r
r
r
⋅⋅+⋅⋅−=⋅⋅=Ω+= +
{}
)1,1,0(
63
63
)1,1,0(
63
3/6
00
0
0
00
00
0
zyxA
zyxC
pc
p
p
V⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧⋅=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
car : 1
63
0
63
13/63/6,3/6, ^^ ypcxpzcCAVV CA
r
r
r
r
r
r
r
⋅⋅=⋅=Ω+=
Ecriture du système d’équations :
Projection des vecteurs rotation :
sur X0 : = 0 (1)
63465435 pppp +++
sur Y1 : 0 = 0 (2)
sur Z1 : 0 = 0 (3)
Projection des vecteurs vitesse :
sur X0 : 0 = 0 (4)
sur Y1 : + + = 0 (5)
θ
sin
54⋅⋅− pl)sin(
46
θ
⋅−lcp 63
pc⋅
sur Z1 : = 0 (6)
θ
cos
54⋅⋅− pl
θ
cos
46⋅⋅− pl
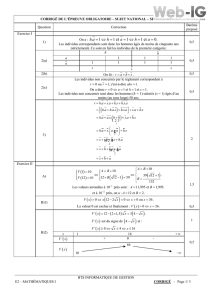
Question 6. :
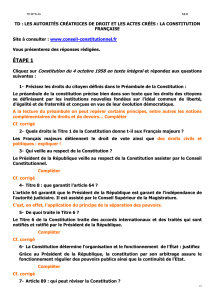
Déterminer le rang « rc » du système des équations de fermeture de chaînes cinématiques qui correspondent à la
structure étudiée (figure 3-3)
- vérifier à partir de ce résultat la mobilité « mc » de la structure ;
- déduire son degré d’hyperstatisme « h ».
Figure 3-3
Corrigé PT SIA – 2005 page 2/17

les équations (2), (3), (4), (8), (9), (10) ne sont pas linéairement indépendantes ;
donc rc = 12-6 = 6
alors : mc = Nc – rc = 8 – 6 = 2 ce qui est correspond aux deux paramètres de position λ et θ.
Et h = 6γ - rc = 6x2 – 6 = 6
Question 7. :
On souhaite éviter les effets néfastes de l’hyperstatisme en ajoutant des mobilités dans les liaisons de la structure. On
choisit de modifier les liaisons 5/4 et 4/6 (respectivement point B et point D sur la figure 3-3). Proposer une liste de
mobilités judicieusement choisies permettant de répondre au problème, et donner la nouvelle écriture des torseurs
cinématiques de ces deux liaisons.
Les mobilités à ajouter devront permettre d’augmenter le rang du système des 12 équations de
cinématique et donc intervenir sur les équations (2), (3), (4), (8), (9), (10) ; il s’agit donc des 6
mobilités suivantes : q54, r54, u54, q46, r46, u46. (on vérifie facilement que le nouveau système
d’équations est un système de 12 équations linéairement indépendantes).
Les torseurs des deux liaisons modifiées s’écrivent :
{}
)1,1,0(
54
54
5454
4/5
0
0
zyxB
r
qup
V⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
= ;
{}
)1,1,0(
46
46
4646
6/4
0
0
zyxD
r
qup
V⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
= ;
3-2 Traitement du problème géométrique et cinématique
3-2-1 Phase de mise en position
Question 8. :
Ecrire la relation vectorielle qui traduit que, dans la position d’initialisation (λ=0), le point T1 est centre instantané de
rotation du mouvement de l’instrument (solide 8) par rapport au repère R0 (réalisation du critère associé à la fonction de
service FS1).
0
0/8,1
r
r=TV
Question 9. :
Dériver le vecteur position 11TO
r
pour en déduire :
- la valeur de la dimension e1 à respecter, en fonction de certaines dimensions du robot ;
- la valeur de la cote d’initialisation λ0, en fonction de la dimension « f1 » de l’instrument chirurgical.
1111 TEEAAOTO rr
r
r++= = 101 zλyd rr ⋅
+
⋅00 zwyv
r
r
⋅
+
⋅− 1
z
1
f
1
y
1
err ⋅−⋅−
0/8,1TV
r
==)( 11TO
dt
dr
)zλy(d
dt
d101
rr ⋅+⋅ +)
1
z
1
f
1
y
1
e( rr ⋅−⋅−
dt
d = 101 λdyz r
r•• ⋅⋅−⋅⋅
θθ
1111 fe yz r
r⋅⋅+⋅⋅− ••
θθ
= ))λ()-e(d( 10111 yfz r
r−+⋅⋅
•
θ
00/8,1
r
r=TV⇒ e1 = d et λ0 = f1
Question 10. :
Déterminer en fonction des grandeurs dimensionnelles caractéristiques du robot (tableau 3-4), la valeur des cotes "ET"
et "HT".
111101 TEEAAOTOTO rr
r
rr ++== = 101 zλyd rr ⋅+⋅ 00 zwyv
r
r
⋅
+
⋅
−1
z
1
f
1
y
1
err ⋅−⋅− = 00 zwyv r
r
⋅+
⋅
−
ET = = v et H001 yTO r
r⋅− T = = w 001 zTO r
r⋅
Question 11. :
Exprimer le vecteur en fonction de et , dans la base
→
A,5/0
V
•
θ•
λ)z,y( 11
r
r
;
ce sont des liaisons « sphère-cylindre »
(ou linéaires annulaires)
Corrigé PT SIA – 2005 page 3/17

Démontrer que le solide (5) est animé d'un mouvement de translation par rapport à (0), puis donner l'expression de
→
E,8/0
V, en fonction de , et des grandeurs dimensionnelles, dans la base
•
θ•
λ)z,y( 11
r
r
== )( 10/5, AO
dt
d
VA
r
r
)z)λ(y(d
dt
d101
rr ⋅−+⋅
λ
= 1101 )λ(d zyz r
r
r⋅−⋅⋅−−⋅⋅ •••
λθλθ
)()( 110/5, BAAO
dt
d
BO
dt
d
VB
r
r
rr +== = )()( 01 y
dt
d
AO
dt
d
r
l
r⋅+ = 0/5,1 )( AVAO
dt
d
r
r
=
les points A et B du solide (5) ont même vecteur vitesse ; (5) est donc en translation.
Alors = 0/5,0/5,0/8, AEE VVV rrr == 1101 )λ(d zyz r
r
r⋅−⋅⋅−−⋅⋅ •••
λθλθ
Question 12. :
Exprimer dans la base , et vérifier que le résultat respecte le critère associé à la fonction de service
T,8/0
V
r
)z,y( 11
rr
FS1.
On a 11001111 )(
1
z
1
yd
1
z
1
f
1
y
1
eydzzzETTTET
r
r
r
r
r
rr
r
rrr ⋅+⋅−=⋅+⋅+⋅−=⋅+⋅+⋅−=+=
λλλλλ
0/80/8,0/8, ^Ω+= rrrr ETVV ET = +
[]
= . 1101 )λ(d zyz r
r
r⋅−⋅⋅−−⋅⋅ •••
λθλθ
0110 ^)( xydz rr
r•
⋅+⋅−
θλλ
1z
r
⋅− •
λ
010/8, =⋅yVTr
r
; le critère associé à la fonction de service FS1 est donc respecté.
4- RESPECT DES CRITERES ASSOCIES A LA FONCTION DE SERVICE
"FS 3"
4-2-1 Vérification de la vitesse
de rotation maximum du moto-
réducteur.
Question 13. :
Déterminer la vitesse nominale de
translation du coulisseau (4) ; vérifier la
conformité avec le cahier des charges.
Vnom = Nnom . 2 . π / 60 . Φ1 / 2 =
6,28 . 19,8 . 10-3 = 0,124 m / s
Conformité car Vnom> 0,1 m / s.
4-2-2 Vérification du temps t1
de mise en vitesse
Question 14. :
Isoler l’ensemble { rotor et pignons du moto-réducteur (1) + poulies-courroie (2) + arbre intermédiaire (3) + pignon (3’)
+ coulisseau à crémaillère (4) + partie supérieure du robot + tambour (3’’) + câble (5) + renvoi (6) + contre-poids (7) }.
Faire le bilan, sans détailler les éléments de réduction des torseurs, des actions extérieures et intérieures à l’ensemble
isolé et préciser si les puissances correspondantes sont nulles ou non nulles.
Isolons l’ensemble { rotor et pignons du moto-réducteur + poulies-courroie + arbre intermédiaire
(3)+ pignon-crémaillère + partie supérieure du robot + tambour-câble + contre-poids},
Bilan des actions mécaniques extérieures :
Actions mécaniques extérieures
Expression du torseur Puiss. galiléenne ( = 0 ou ≠ 0) Justifications
{T (Bâti → 3) } P(B → 3 / B ) = 0 - pas de frottements
- la liaison ne se déplace pas
O
Corrigé PT SIA – 2005 page 4/17

{T (Bâti → 6) } P(B → 6 / B ) = 0 - pas de frottements
- la liaison ne se déplace pas
{T (Bâti → 4) } P(B → 4 / B ) ≠ 0 - frottements dans la liaison
{T (Pesanteur → 7) } P(Pes. → 7 / B ) ≠ 0 - déplacement vertical de 7
{T (Pesanteur → 4) } P(Pes. → 4 / B ) ≠ 0 - déplacement vertical de 4
{T(Bât.+st.1→ Rot.1+pign.)} P(B → Rot.1+pign. / B ) ≠ 0 - puissance du moto-red.
Actions mécaniques intérieures
Expression du torseur Puiss. inter-efforts ( = 0 ou ≠ 0) Justifications
{T (5 ↔ 6) } P (5 ↔ 6 ) = 0 - pas de glissement câble/poulie
{T (2 ↔ poulies) } P (2 ↔ poulies ) = 0 - pas de glissement courroie/poulies
- courroie inextensible
{T (5 ↔ 3’’) } P (5 ↔ 3’’ ) = 0 - pas de glissement câble/poulie
{T (3’ ↔ 4) } P (3’ ↔ 4 ) = 0 - pas de frottement
Question 15. :
Exprimer la somme des puissances des actions de pesanteur sur l’ensemble isolé ; montrer que cette somme est nulle
lorsque le contre-poids (7) et le tambour (3’’) d’enroulement du câble sont correctement dimensionnés (critère
d’équilibrage statique associé à la fonction de service FS5) .
Exprimer littéralement la somme des puissances pendant la phase de montée, en fonction de Cred , ωred , Zgliss , Φ1 et M.
Expression de la vitesse de déplacement du contre-poids : Vc = - Φ1 / 4 . ωred = - λ’ / 2.
Expression de la puissance des actions de pesanteur sur l’ensemble isolé :
P(Pes. → (7+4) / B ) = - 2 . M . g . Φ1 / 4 . ωred + M . g . Φ1 / 2 . ωred = 0
Pext + Pint (en montée) = Cred . ωred - Zgliss . ωred . Φ1 / 2
Question 16. :
Exprimer littéralement l’énergie cinétique galiléenne instantanée de l’ensemble isolé, en fonction de ωred , J1 , J2 , Φ1 et
M.
En déduire l’expression littérale du moment d’inertie équivalent Jéqu, à toutes les pièces en mouvement, ramené à
l’arbre de sortie du réducteur.
Faire l’application numérique (trois chiffres significatifs sont attendus).
Expression littérale de l’énergie cinétique galiléenne instantanée :
Ec tot = ½ [ J1 + J2 + M . Φ12 / 4 + 2 . M . Φ12 / 16 ] . ωred2 = ½ [ J1 + J2 + 3 . M . Φ12 / 8 ] . ωred2
On en déduit l’expression littérale du moment d’inertie équivalent : Jéqu = [ J1 + J2 + 3 . M . Φ12 / 8 ]
Application numérique : Jéqu = 2 . 10-3 + 1 . 10-3 + 3,75 . 10-3 J
équ = 6,75 . 10-3 kg . m²
Question 17. :
Ecrire littéralement le théorème de l’énergie cinétique pendant la phase d’accélération en montée, en fonction de Jéqu ,
Cred , Zgliss , Φ1 et
ω
•
red = d ωred /dt.
En déduire l’expression de l’accélération angulaire
ω
•
red pendant cette phase.
Expression littérale du théorème de l’énergie cinétique :
[ J1 + J2 + 3 . M . Φ12 / 8 ] . ωred . ω’red = Cred . ωred - Zgliss . Φ1 / 2 . ωred
On en déduit l’expression de l’accélération angulaire : ω’red = [ Cred - Zgliss . Φ1 / 2 ] / Jéqu
Question 18. :
Faire l’application numérique lorsque Cred = Cnom = 1,4 N.m.
En déduire le temps t1 pour que le moteur atteigne la vitesse de rotation nominale Nnom et vérifier sa conformité du
système par rapport au critère du cahier des charges (t1 < 0,1 s).
Application numérique : ω’red = (1,4 – 10 . 19,2 . 10 -3 ) / 6,75 . 10-3 = 180 rd / s2
On en déduit le temps t1 pour que le moteur atteigne la vitesse de rotation nominale Nnom = 60 tr/mn
ωred = 180 . t donc t1 = 60 . 2 π / 60 / 180 = 0,035 s
Conformité du système par rapport au critère du cahier des charges t1 < 0,1 s.
Corrigé PT SIA – 2005 page 5/17
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%